当iPad都开始装激光雷达,马斯克会被打脸吗?| 科普
撰文 | 熊宇翔 编辑 | 周长贤
总是被调侃创新枯竭的苹果,终于再一次挑起了人们的好奇心。
3月18日,苹果官方一则消息,惊动了自动驾驶行业。消息并非苹果宣告其自动驾驶项目取得突破,而是在其全新iPad Pro上,搭载了一枚激光雷达。
近几年,激光雷达几乎已经成为自动驾驶的代名词。作为关键传感器,它保障着无人驾驶汽车对周边环境的感知能力,但如何将其体积做小、性能做高并且规模量产,一直是困扰业界的难题。
在iPad Pro如此“寸土寸金”的消费电子产品上,如何容纳下体积并不小的激光雷达?苹果在这一领域的突破,是否能对车载激光雷达形成启发乃至推动力量?又是否是对马斯克“激光雷达无用论”的打脸?
激光雷达:从太空到手机
激光雷达,激光+雷达,听起来就像是一种高大上的装置,但其基本工作原理每个人都不会陌生:距离=速度X时间。如果我们将激光雷达极度化简,那么它就是一把用光来进行测量的尺子——光线由激光光源射出,“撞上”物体后反射,经传感器接收,再由数字电路处理得到往返时间,光速X时间/2(注:高精度应用中并非除以2),便是它量出的长度。

这把尺子最先用于天文领域。比如NASA(美国国家航空航天局)会在航天飞机与空间站对接时用它来测量误差,也会用它来监测大气。
其实,在测绘领域也常能看到它的身影。施工现场的激光测距仪,某种程度上就是一种激光雷达的基础形态,它通过精准地测距有效避免施工误差,是人类工程建设中不可缺少的一环。

但激光雷达如今最为人熟知的领域,还是无人驾驶汽车。
激光雷达怎么从天上来到地下,又是如何从工地来到车上,历史要往回翻一会儿。
2007年,美国莫哈维沙漠,Darpa(Defense Advanced Research Projects Agency,美国国防高级研究计划局)举行的一场无人驾驶挑战赛正在进行,参赛队伍需要自行改装一台车辆,使其可以在严苛的沙漠环境中自行驾驶数十公里来到终点。这场比赛要考验的一个关键技术,叫做避障。
聪明的工程师们很快可以找到激光和这项赛事的连接——既然激光测距仪可以标出一个距离准确的点,那么,在一个设备上多装几个测距仪,根据“三点成面”的原理,岂不是可以绘出物体的大致轮廓,从而避开障碍?——斯坦福大学的自动驾驶团队,当年就是这么想的。他们在Darpa自动驾驶挑战赛上的参赛车辆,头上顶着的就是一个个“测距仪”。

不幸的是,这个天才的想法,并没有帮助他们的车辆跑完全全程,一个个单线测距仪组合起来,性能仍然不够看。
对这场比赛深感兴趣的美国声学公司Velodyne总结了这些经验,跳出了自己的本行,针对性地开发出了64线激光雷达,就是这个像大花盆一样的东西。它相当于在车头顶了64个同步旋转的测绘仪,在经过处理后,其输出的信号,已经可以相当程度上还原物体的三维特征。
Velodyne这枚激光雷达,通过激光测距的基础原理,获得了足够多的深度信息,帮助自动驾驶实现了3D视觉。
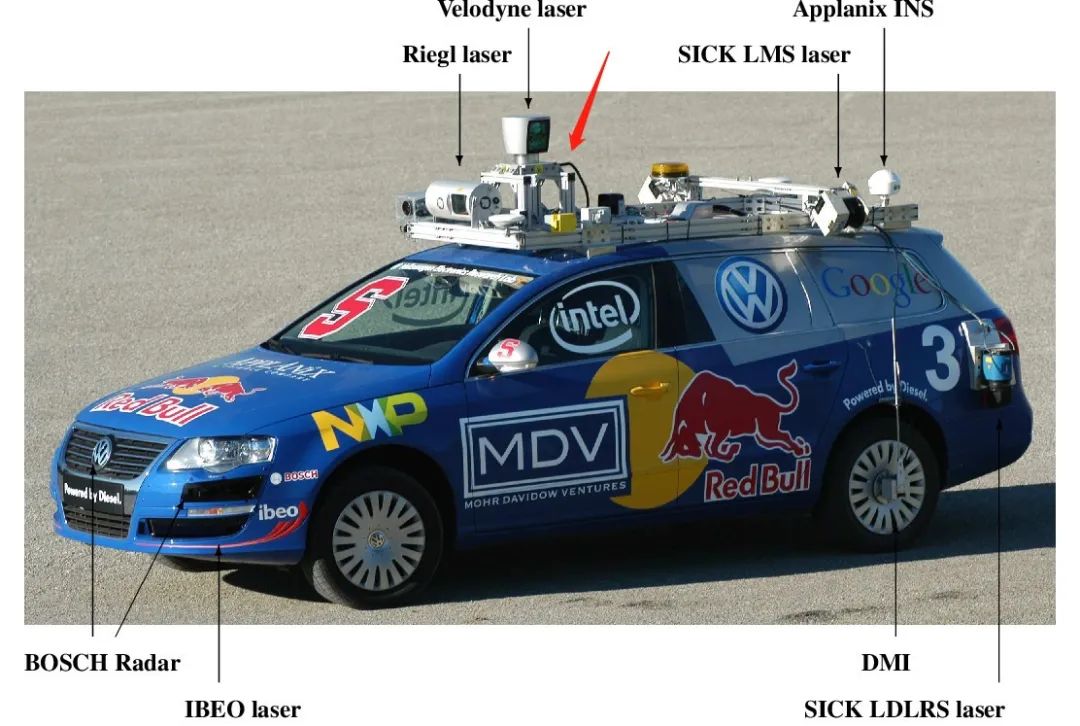
事实证明,它的确是有效的。在第二届无人驾驶挑战赛上,在装上了Velodyne的64线激光雷达后,斯坦福的无人车跑完了全程。遗憾的是,斯坦福不敌卡耐基梅隆大学屈居第二,因为后者的车也装上了同款激光雷达。

后来,激光雷达凭借其更精准的环境感知能力,逐渐成为无人驾驶的标配。只有一个例外——特斯拉CEO马斯克认为,用激光雷达是愚蠢的。
不过,虽然马斯克在一边唱反调,但并没能阻止激光雷达的进步,车载激光雷达发展得精度更高、体积更小、更可靠、更便宜。这些特质,我们可以用小型化、集成化两个词来概括,而这两个词正是本文想要讲述的关键词,也代表着激光雷达的发展趋势。
多年前的Darpa参赛者们大概不会想到,技术发展催生的结果如此有趣,有一天激光雷达会被用在平板电脑或者手机上。
在苹果新款iPad Pro的文案上,明明白白写着它要支持的功能——AR(Augmented Reality,增强现实)。

在此之前,AR的思路多是依靠手机的处理器驱动AI算法,把物体从手机摄像头拍到的画面中“抠出来”,再叠加到相应的地方(比如各种短视频中常见的动态贴图),这样的好处是成本低,实现难度小,但摄像头的传感器本身并不输出“距离”信息,因此深度信息通常是估算,并不准确。对于一些要求“高精度深度信息”、“高还原度三维建模”的AR应用,比如AR试衣、AR家装乃至体验更好的AR游戏,摄像头在硬件上的先天不足,成为了它们发展的绊脚石。
而苹果无疑是将AR作为下一代核心技术推动的先驱。为了扫除AR发展的障碍,苹果大刀阔斧地启用了激光雷达。至于如何将原本硕大的激光雷达塞进体积娇小的iPad Pro中,综合公开材料以及激光雷达行业人士的分析,苹果方面应是在发射端使用了VCSEL(垂直腔面发射激光器)光源,而在信号接收端使用了SPAD(单光子雪崩二极管),两者的共同特征是,在小巧的半导体上,也可以实现大花盆式激光雷达的部分职能。
而随着激光雷达引入iPad,我们也可以期许,激光雷达小型化、集成化的发展趋势,让其很有可能出现在未来的iPhone,乃至传说中的苹果AR眼镜中。
有趣的一点是,苹果官方对iPad Pro上“激光雷达扫描仪”的描述也引起了激光雷达业内人士的讨论。通常,成为激光雷达的一个必要条件是,激光光源可以转动或者激光光束可以改变发射角度。
而从iPad Pro的形态和作用来看,既无空间容下一个活动装置,更无必要向摄像头视野外发射激光,因此行业人士推测iPad Pro上的“激光雷达”并无扫描之实,只是借了“扫描仪”这个人们更常见的概念便于宣传。
苹果再创历史背后
其实,苹果在iPad Pro上使用激光雷达,尽管有些出人意料,但却并非毫无根据。因为激光雷达在三维重建上的显著作用,苹果其实很早就应该接触到激光雷达——比他们开始自动驾驶研发还要早。早在十余年前苹果地图开始开发3D地图时,激光雷达就被用于还原城市图景了。
再回过头看消费电子领域,当3D视觉再度因为人脸识别、AR、VR的兴盛成为热门技术时,一条最终通往激光雷达的技术演进路线或许已经提前铺就。
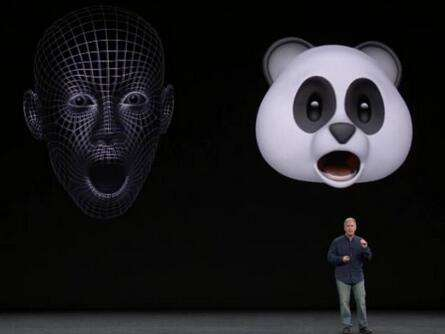
2017年,当苹果推出名噪一时的Face ID时,这项功能便已经有了3D视觉——结构光技术的加持。当时结构光的技术不仅为Face ID提供支持,其实也衍生出了苹果用户通过自拍创建个性化表情的animoji。尽管animoji不温不火,但苹果要为AR技术提前打好基础的用意已经开始显现。
2018年,华为、三星、LG、Vivo等手机企业同样瞄准AR的机会,先后开始应用ToF(Time of Flight)技术,其原理和激光测距大体相同,都是靠红外激光作为探测手段。因此,相比只有摄像头的手机,ToF加持的手机有更强的三维视觉能力,也能为AR应用提供更好的支持。
不过,此时开始应用的ToF技术属于iToF(indirect Time of Flight,间接飞行时间法),它并不直接利用光线飞行时间来算出距离,而是通过计算频率经调制后的连续光波所产生的相位差,来间接地算出距离。采用iToF的一大好处是和传统的图像传感器CMOS/CCD技术衔接较好,能够降低技术方案的成本,功能模块也容易小型化、塞进消费电子产品中。
但iToF方案也有其不足——这一方案采用的间接计算相位差的方法,本质上是为了补偿图像传感器响应时间不够快(ns,纳秒级别,1纳秒等于1亿分之1秒,光1纳秒走过的距离约为0.3米)。因为条件限制,iToF技术不仅在探测精度上(厘米级)受限,且探测精度会随距离的拉长而衰减。
而苹果在iPad Pro文案上标明的dToF(direct Time of Flight,直接飞行时间)技术,分明是iToF的升级。顾名思义,相较于iToF,dToF则是直接测量光线飞行时间来算出距离,其传感器响应时间可以达到ps(皮秒,1皮秒等于1万亿分之1秒)级别,探测精度不仅可以达到毫米乃至亚毫米级别,而且造成这一技术差异的关键,正是两种方案不同的传感器——dToF技术使用了SPAD。
SPAD( Single Photon Avalanche Diode,单光子雪崩二极管),是一种经过特别设计的光电二极管,相较于传统的光电传感器(比如CMOS、CCD),有着高达百万倍的增益、极高的灵敏度,还拥有对单个光子进行探测的能力。它的性能,在理论基础上抬高了激光雷达的探测距离上限以及探测精度等指标。然而此前,SPAD却有一个难以忽视的特点:小型化困难。
我们知道,典型的电子成像系统,比如摄像机,其关键就在于内置的图像传感器——CMOS/CCD。在小小的一枚芯片中集成了大量的成像单元,排布成了密集的传感器阵列,才让各种相机有了上千万的像素(分辨率)。
同样,3D视觉也需要足够高的分辨率,还原出来的世界才会尽可能真实。因此,SPAD如果要具备成像的能力,也需要形成阵列,业内将多个SPAD组合的阵列称为SiPM(硅光电倍增管)。

CMOS阵列示意
尽管SPAD/SiPM上个世纪九十年代便已诞生,但因为产业成熟度、工艺等原因,SPAD的体积下不来,因此SiPM也无法在一个较小的体积内堆叠足够的SPAD,分辨率自然上不去。
而近两年,在行业需求增长、业界技术进步后,SPAD的集成度被大大提高,生产得以被纳入传统的半导体制造范畴。比如,松下今年就展出过1200X900(108万像素)的大规模SPAD阵列,其像素密度已经接近更成熟的iToF传感器。

一种SPAD阵列
除了松下,日本的索尼、欧洲的意法半导体、美国的安森美半导体,都在消费电子或汽车领域研发、力推SPAD传感器阵列。外媒有消息称,苹果iPad Pro使用的SPAD阵列,其分辨率可能达到320X240或640X480,即最多可能超过30万像素。
而回到我们关注的汽车领域,在激光雷达上使用SPAD阵列,并不是一件新鲜事。2018年,美国激光雷达初创公司Ouster便公开表示,其新型激光雷达使用了VCSEL的光源和SPAD传感器阵列,由此实现了其产品的低成本、高探测精度。

Ouster激光雷达
因此,苹果在iPad Pro上一石激起千层浪的激光雷达,背后其实是整个产业界的进步在做支撑,甚至不排除不同行业不同应用场景在方法论上的相互学习。
不过,激光雷达业内人士也表示,尽管行业内激光雷达元器件的小型化、集成化已经进步明显,但要把其发射光源、传感器阵列以及数字处理电路塞进消费产品仍不是一件易事。在这个过程中,苹果应联合其供应商进行了深层次的定制化、集成化工作,而且不排除使用了3D IC的技术,将激光雷达的各单元进行堆叠以节省空间。
马斯克会被打脸吗?
对激光雷达的从业者来说,苹果在iPad上应用这一技术无疑令人兴奋。因为,工程创新能力极强的苹果,在iPad上使用激光雷达,无疑是对这一技术探测能力的肯定。
2018年,同样以工程创新能力极强著称的特斯拉CEO马斯克,公然开怼激光雷达,认为它是自动驾驶的“拐杖”,业界使用激光雷达是技术不够强的体现。他类比人类的驾驶模式,认为AI+摄像头的纯视觉智能组合,足以胜任无人驾驶任务。
不过,苹果的自动驾驶项目,就是激光雷达技术路线的拥趸。如今,激光雷达在iPad Pro上的应用,能否推导到自动驾驶领域,证明其技术的优越性?又能否通过iPad Pro的大量生产,进一步催熟产业链,使激光雷达在车载领域迎来更多应用机会?
尽管这是激光雷达企业给自己“打广告”的绝佳机会,但行业人士在向路由社分析时,仍表示了克制——隔行如隔山,激光雷达在iPad Pro这类消费电子产品上的规模应用,一时半会儿还无法对车用激光雷达形成直接利好,也并不能全然证明特斯拉的纯视觉路线走不通。原因在于,消费电子与汽车自动计时场景不同、需求不同,难以简单类比。
以iPad Pro为例,其采用激光雷达,并非只是看中了激光雷达的测量精度,而是在产业链成长起来时,努力“踮了踮脚”,通过这个方案在性能、体积、成本、生产难度、可靠性等多方面达成了一个平衡,在5米距离内的精准探测上得出了一个“局部最优解”。
而在车载激光雷达领域,其对探测距离、实时性(动态探测能力)、分辨率、抗干扰性以及可靠性(车轨)等指标都有更加严苛的要求。至少到目前为止,激光雷达业界还没有找到一个成本够低而性能又足够靠谱的、让自动驾驶下游企业可以坦然接受的方案。

(相较汽车而言,上图无人机、服务机器人等使用的激光雷达模块可能更有机会享受iPad Pro带来的利好)
不过,激光雷达行业正在尝试“融会贯通”。北醒光子联合创始人郑凯称,从2019年开始,激光雷达的从业者不再局限在此前框定的某一条技术路线中研发,而是从机械/固态,Flash面阵光/OPA相干光/MEMS微震镜的技术分立中跳脱出来,将原本属于各阵营的底层技术糅合起来,去解决激光雷达量产所要应对的具体问题。
而马斯克推崇的依靠纯视觉智能实现自动驾驶的路线,早年在业界不甚受欢迎的一大原因是该技术对算力消耗过高,AI算法不完善。近些年随着车载芯片算力的提升以及算法的进步,这一路线正被越来越多的企业关注。
因此相比较而言,无论是激光雷达,还是AI纯视觉,都有着各自的成长曲线。苹果iPad Pro上使用激光雷达,暂时还轮不到车载激光雷达欢呼,也不能形成对马斯克的“打脸”。
但参考苹果过去多年的“禅宗”、“极简”设计理念引领的工程设计风潮,车载激光雷达的工程师们在拆了一台iPad Pro后,没准儿能把激光雷达做得更符合美学。



-

凤凰网汽车公众号
搜索:autoifeng

-

官方微博
@ 凤凰网汽车

-

报价小程序
搜索:风车价


.png)
大家都在看







趣图推荐
.png)