4D成像雷达,加速自动驾驶落地的黑科技?
自动驾驶遥看还是个飘渺的梦想,但在一系列感知传感器的推动下,它正在跑步照进现实。
激光雷达是当今自动驾驶领域的当红炸子鸡,但今天讲堂要讨论的,却是毫米波雷达,确切地讲,是4D成像毫米波雷达。
毫米波雷达在自动驾驶领域中是常常被忽略的存在,当我们谈及感知路线之争时,讨论的都是激光雷达VS.摄像头,但其实这两个方案,都融合了毫米波雷达。
★ 毫米波雷达为什么存在感不强?
毫米波雷达的原理,是通过不断发射和接收毫米波波段的电磁波:计算发射/返回的时间差来实现测距;通过多普勒效应计算返回电磁波的频率变化来实现测速;计算返回电磁波的相位差来实现方位角的测量。
毫米波雷达是相对成熟的车用感知传感器,成本相对低廉,因此摄像头+毫米波雷达的感知融合方案成为早期实现L2级自动驾驶的首选。但在自动驾驶驶向L3+的路上,毫米波雷达的不足渐渐被放大。
首先是毫米波雷达无法测高,例如虽然配备了前置毫米波雷达,但车辆仍有可能检测不到前方的悬浮障碍物。
自动驾驶领域的经典案例,就是台湾省的特斯拉撞向侧翻货车事故。在这个案例中,特斯拉的摄像头感知失效,无法识别出侧翻的白色货车,此时,毫米波雷达作为备用传感器,应该识别出前方障碍物,并发出预警,但毫米波雷达也隐身了。

毫米波雷达隐身的主要原因,是毫米波雷达无法测出货车上方桥梁和道路指示牌的高度,在毫米波雷达的“眼里”,静止的货车、桥梁、指示牌都是地面上的物体,最好的做法,就是将这些信号全部过滤掉。
细心的读者可能发现了,这个案例还牵扯出毫米波雷达的另一个弱点,就是静止物体识别困难。
在我们行驶的道路上有很多静止物体,如高挂着的道路指示牌、拐角处的行道树等,如果不将这些静止物体反射的信号过滤掉,毫米波雷达就会发出前方有障碍物的错误预警,造成“幽灵刹车”。
过滤掉静止物体的反射信号后,毫米波雷达隐身了,摄像头又失效,自动驾驶汽车成了瞎子和聋子,自然就撞上侧翻货车了。

毫米波雷达的另一个弱点,是水平角分辨率低。
角分辨率代表着雷达的指向精度,比如雷达的角分辨率为指向精度0.01弧度(换算成角度就是0. 6°),代表着在100米的距离获得1米的分辨率,如果雷达的指向精度是0.001弧度的话,那么就可以在1000米的距离获得1米的分辨能力。
水平分辨率就是指左右两个扫描的激光点形成的夹角,显然夹角度数越小,角分辨率越高。相较激光雷达,毫米波雷达的角分辨率明显不具优势:大陆77GHz ARS 408-21长距离毫米波雷达的主流水平方向角分辨率为1.6°,而现在部分厂商的固态激光雷达的水平角度分辨率是0.05°。

此外,点云级融合难,难以绘制地图,是毫米波雷达相较于激光雷达的另一软肋。
上述种种限制,决定了现阶段的毫米波雷达只能作为自动驾驶感知系统的备用传感器。但背地里,这个“小透明”正焕发着新生,甚至隐隐有了挑战激光雷达地位的感觉。
★ 飞上枝头变凤凰,变身4D成像雷达!
毫米波雷达进化到4D成像雷达,不是简单的技术革新,而是量变到质变的过程。
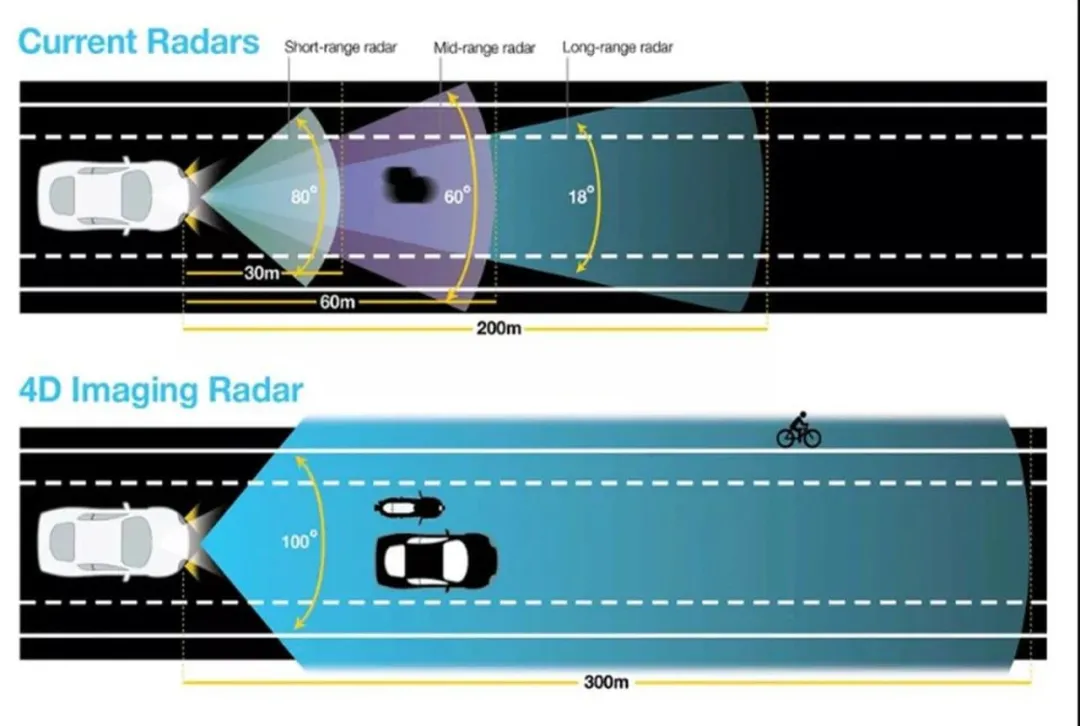
传统的毫米波雷达一般只有12个信道(3发射*4接收),而4D成像雷达的信道则可达到上百个。以上汽R品牌ES33所搭载的采埃孚4D毫米波雷达为例,其拥有192个通道,是普通毫米波雷达的16倍,这意味能接受的返回信息点的增多,分辨率得到显著提升。
相较于传统毫米波雷达,4D成像雷达的另一项重要提升,是增添了高度这一维度。有了垂直分辨率的数据维度,也就具备了测高能力,对于4D毫米波雷达来讲,前方障碍物的返回信号不再是粗暴地排列在二维地面上,而是呈现在立体的三维空间里。
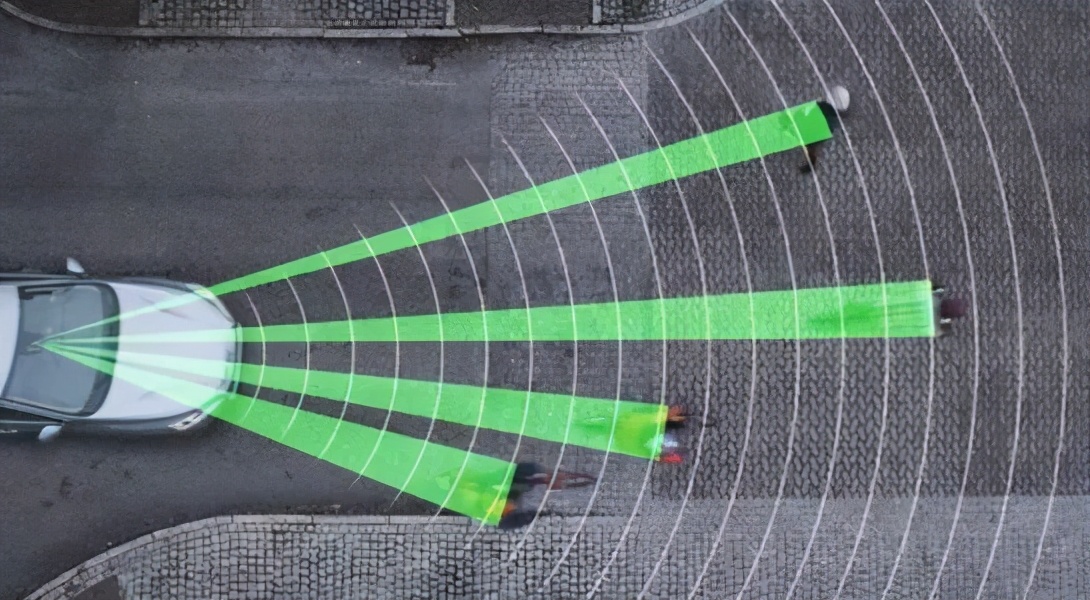
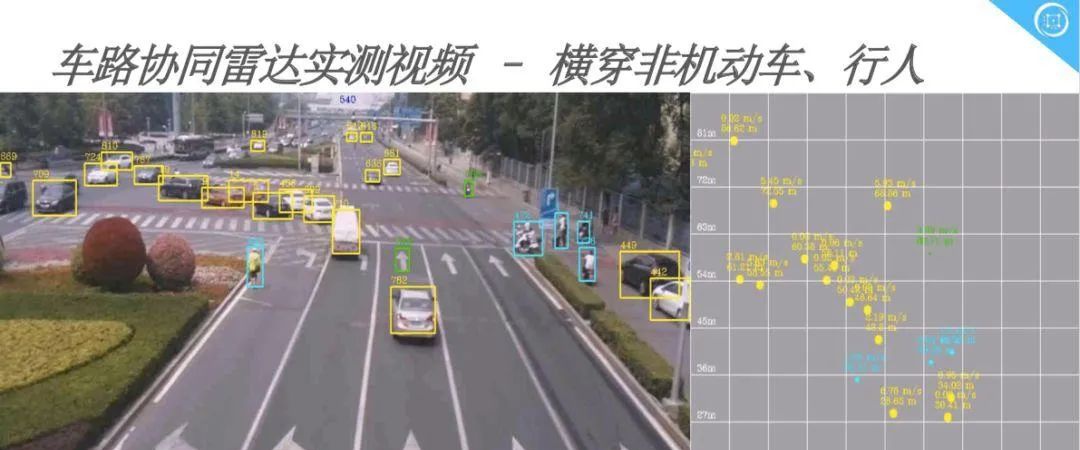
直观体现,就是同样面对前方障碍物,毫米波雷达只能接收到有限的返回信息点,仅能判断出前方有障碍物,而4D成像雷达则可以接收数十倍的返回信息点,能进一步探测出物体的形状,甚至是结合算法识别出物体,相当于自动驾驶多了双眼睛。
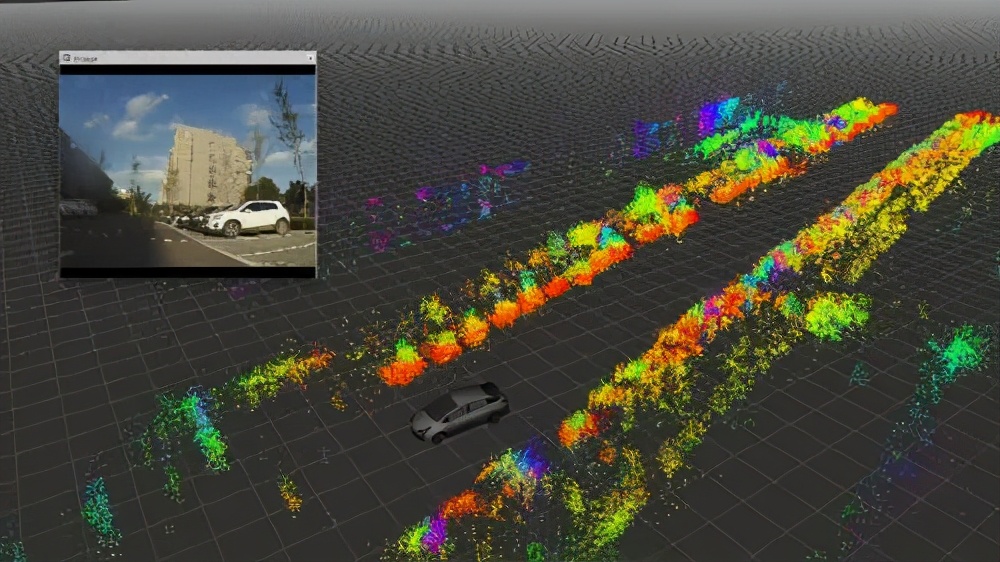
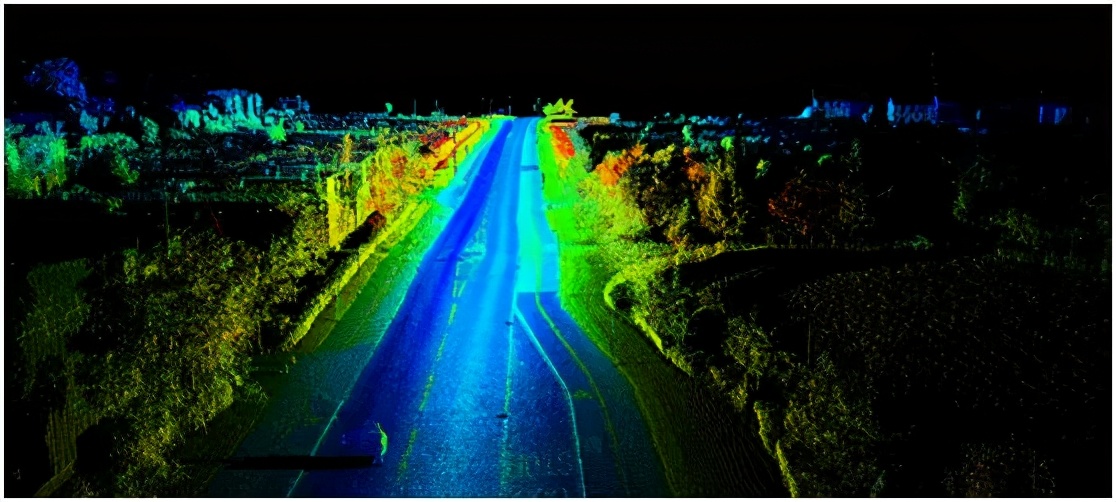
返回信息点的增多和分辨率的提升,同时带来了点云融合的可能,孤立稀少的信息点变为密集的3D雷达波点云,SLAM(即时定位与地图构建)更加容易。
此外,探测距离也是4D成像雷达的一大优势。华为之前发布的96线激光雷达探测距离为150米,传统长距毫米波雷达的探测距离为200米,而300米似乎已是4D成像雷达的探测距离及格线。
探测距离更远,信息获取就越早,留给系统的处理时间就越多,系统就会更加从容,安全就多了份保证。
★ 4D成像雷达如何推动自动驾驶落地?
首先是对摄像头视觉感知的完美补充。
众所周知,马斯克是坚定的视觉派,对激光雷达嗤之以鼻。但就像我们之前提到的,摄像头+毫米波雷达的感知融合方案有绕不过去的噩梦,就是遇到暴雨和强光等恶劣环境,或是行人突然出现在行驶路线上等小概率极端场景时,摄像头视觉感知失效,毫米波雷达隐身。

这种情况下,4D成像雷达因为不惧雨、雪、雾、霾、黑暗、阳光直射的全天候运作特性,成为摄像头的可靠感知替代设备。
另一方面,4D成像雷达毕竟还是毫米波雷达的一种,而摄像头和毫米波雷达融合算法的成熟,决定了4D成像雷达与摄像头的融合要比激光雷达与摄像头的融合方便的多。
到时候,摄像头视觉负责物体分类,4D成像雷达提供位置、速度、尺寸、航向等多维度信息,两相配合,突然觉得自动驾驶的感知靠谱了一些。
从特斯拉在硅谷的测试车辆谍照来看,左下角大大的PCD板暴露了,特斯拉已经在推进“4D视频信息+4D高清成像雷达”的感知融合方案了。

其次,特斯拉软件黑客"green "也曾在软件更新中发现了新功能的蛛丝马迹。在特斯拉最近的软件更新中增加了一个名为 "凤凰 "(Phoenix)的新雷达选项,Phoenix其实就是Arbe的4D高清成像雷达解决方案。
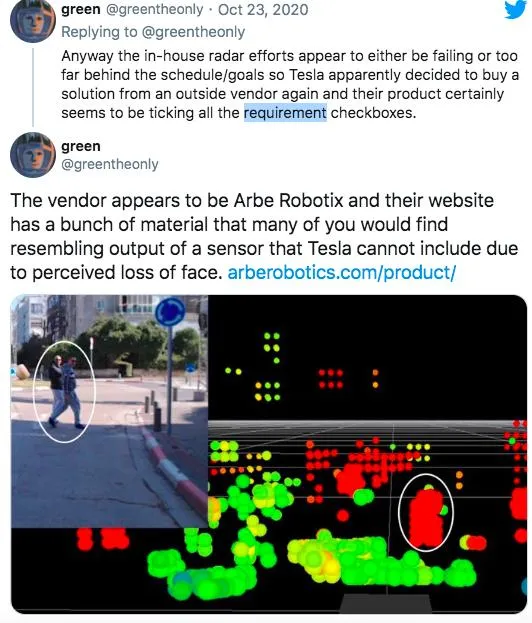
既然“毫米波雷达能够实现类似激光雷达的效果”,那么在要求更高的Space X上使用激光雷达,在自动驾驶系统中使用设备成本和接入成本更低的4D高清成像雷达。马斯克嘴硬的背后,其实是商人的精明。
那么问题来了,“4D成像雷达可让自动驾驶汽车完全摆脱对激光雷达的需要”么?
Arbe的首席执行官兼联合创始人Marenko的表态可能有些激进了,起码在目前阶段,4D成像雷达仍有不及激光雷达的地方。
虽然4D毫米波雷达的性能有了质的提升,但毫米波存在一定的随机性,而相比之下,激光雷达的点云分布更加平均、成像也更加稳定。这点就决定了4D成像雷达还不能完全代替激光雷达。
不过,4D毫米波雷达还是有其优势的,就是成本。实现L3+自动驾驶并不难,难的是量产推广,阻力之一就是感知系统太昂贵了。
我们知道激光雷达发展迅猛的最重要原因,是成本的下降,只是,还不够亲民。虽然本田Legend刚刚在3月成为了全球首辆L3级自动驾驶量产车型,但5个激光雷达的成本,是其推广量产的拦路虎之一。
如果,能在保证感知能力不过分下降的前提下,将部分激光雷达替换成4D成像雷达,自动驾驶的落地无疑又前进了一步。
★ 4D成像雷达还要修炼哪些内功
4D成像雷达想要落地,首先要理顺技术路线。
当下的主流技术路线,是基于标准77/79G芯片,用2/4/8级联来增加实体天线,从而提升功率和角分辨率。但这种方案的弊端是雷达的尺寸大,不利于装车。
另一种解决方案,是使用4D成像专用芯片,Arbe、Vayaar、Unhder等供应商走在坚持这条路线。但此方案的问题是,4D成像雷达多发多收,天线挤在一起,信号虽然强了,但干扰也大了,覆盖距离可能受影响。相对高企的成本也是量产的一大阻力。

此外,还有些创新性的技术路线,例如利用算法自适应调频率、调幅、调相来提高虚拟天线数:当在高速上需要看的远时,就调高功率,看的远;在十字路口时,就调低功率,看得更清楚。
当然,除了技术路线的明确,4D成像雷达还必须考虑车规级,满足稳定、可靠、抗干扰等要求。最后,在C-SWAP(Cost/成本、Size/尺寸、Weight/重量、Power/功耗)限制中寻求平衡也至关重要。
★ 结语
无论如何,4D成像雷达都是自动驾驶领域不可忽视的感知传感器。特斯拉、Waymo、华为、大陆、采埃孚、Arbe、Vayaar、Unhder等主机厂和供应商都在布局4D成像雷达技术。
各大厂商的军备竞赛后,一定会是4D成像雷达的技术路线愈发明晰,车规级和C-SWAP的枷锁逐渐松动,随之而来的,可能就是L3+自动驾驶离我们更近了一步。
本文作者为踢车帮 逝水



-

凤凰网汽车公众号
搜索:autoifeng

-

官方微博
@ 凤凰网汽车

-

报价小程序
搜索:风车价


.png)
大家都在看







趣图推荐
.png)