试驾威马W6:动动手就能泊车,语音助手支持连续对话

作者 | 克克
编辑 | 晓寒
5月23日,车东西受邀参加了威马W6的试乘试驾活动,重点体验了该车型的无人自主学习泊车功能(HAVP)、支持自定义场景编程的车机系统和市区高速混合场景下的驾乘感受。
无人自主学习泊车功能(HAVP)以自动驾驶域控制器和全车23个探测元件为基础,以5G网络和百度Apollo云端服务器为核心,可通过车机或手机APP遥控的方式实现。实际体验中,车东西通过车机和手机APP两种方式都成功实现了车辆自动驶入和驶出固定停车位。
场景编程是威马W6智能座舱的亮点之一,用户可以通过手机APP开启自定义编程,实现驾驶辅助功能、车窗、座椅、空调、音乐、氛围灯等软硬件模块的自由组合与触发设定。同时,依托高通8155芯片的高算力,威马W6的语音助手可以比较精准迅速地识别语音指令,而且支持15秒内连续下达指令和中途打断追加新指令等功能。
驾乘感受上,威马W6就是一台很好开的家用舒适性SUV。值得指出的是,这款车的电子稳定程序反应迅速且作用明显,在雨天湿滑高速公路上成功避免了事故发生。
一、动动手就能泊车 高精地图泊车年底推出
车东西首先在停车场体验了威马W6车型无人自主学习泊车功能(HAVP)。
第一步是让车辆学习泊车路线,驾驶者需要在中控屏幕上开启自主学习泊车功能,并亲自驾驶车辆完成一次泊车。
驾驶者完成示范泊车后,系统会根据感知元件搜集到的环境信息数据和驾驶者的人工操作数据整合起来,通过5G网络上传到百度Apollo云端服务器上。
云端服务器会根据整合得来的数据生成一个自动泊车程序,车机系统会通过5G网络下载这个程序,这个程序能够指引自动驾驶域控制器复现驾驶者在控制车辆动力、转向、制动等系统的方式,实现自动泊车。
也就是说,威马W6就像一个学生,车主只需教它一遍应该如何停入车位,它自己就能学会而且永远不忘。以后车主再想以几乎一样的路径、操作方式停进同一个车位,只需在中控屏上选择已有的自主泊车程序并运行它。
除了车机之外,车主还可以通过手机APP对车辆下达自动泊车的指令。只要车机系统已经从云端下载好了自动泊车程序,车主可以通过手机APP启动程序的运行,车辆就会完成自动泊车。

▲手机APP控制车辆自动驶入停车位
为了防止因误触启动按钮而引发交通事故,手机屏幕上的启动按钮被设置成了必须持续按压才能起作用的模式。车主需要持续按压手机屏幕上的按钮,车辆才会保持行驶状态。
如果挪开手指,车辆就会自动刹停。当然了,在驶入或车位时,如果车辆的感知系统察觉到周围有车辆、行人、障碍物且无法避让,那么车辆也一样会自动刹停。
在车辆、行人挪开之后,车主只需重新按压手机屏幕上的启动按钮,车辆就会从刚刚中断的地方继续完成泊车。
当车辆顺利停进车位后,会通过鸣笛和闪灯的方式告知车主自主泊车已成功,车主的手机屏幕上也会弹出响应的提示。
无人自主学习泊车功能(HAVP)不仅能让车辆完成自动停车入库,也能让车辆完成自动驶离车位。方法和之前一样,车主只要为车辆示范一遍,系统就能学会如何从这个车位驶出并前往车主事先安排好的位置。
▲手机APP控制车辆自动驶离停车位并前往预定位置
目前,车主需要在车辆周围100m内才能通过手机遥控车辆进出停车位。威马表示,预计在今年年底,他们会将这个距离提升至200m。
要实现无人自主学习泊车功能,离不开丰富的感知元件。威马W6搭载两个前视摄像头,4个环视摄像头,5个毫米波雷达和12个超声波雷达,能够实现全方位探测。
实现功能的另一大功臣就是百度Apollo云端服务器。百度云端服务器拥有非常强悍的算力,它的云端算力最高能达到100万TOPS级别,能够以很快的速度生成一套能够实现自动泊车的程序。
5G网络也是整个过程中重要的一环,它能够支持海量数据传输,让行车数据的上传和泊车程序的下载都变得非常快。
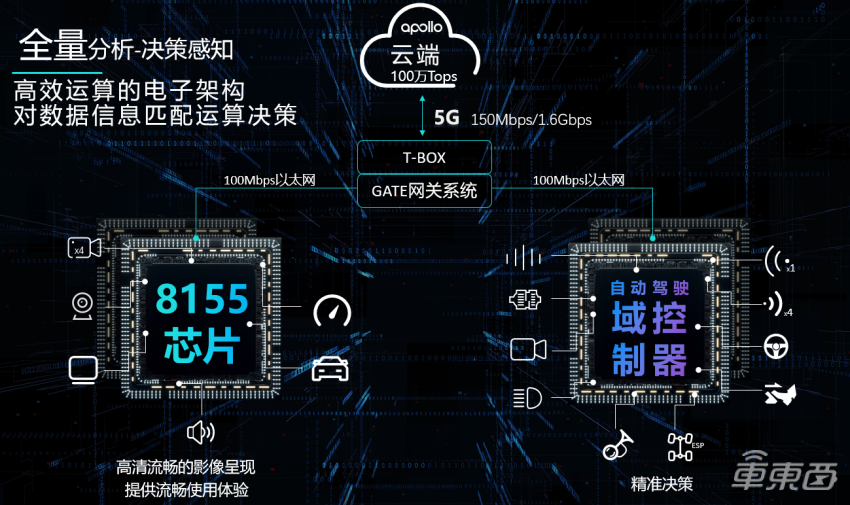
▲威马W6拥有能够高效运算的电子架构
遗憾的是,无人自主学习泊车功能(HAVP)只适用于有固定车位且进出路径相对固定的车主。威马表示,预计在今年年底,他们还会推出无人高精地图泊车功能(PAVP),并通过OTA线上升级的方式将此功能添加到车机上。
威马工作人员还强调,他们不打算从百度或高德这样的厂商去购买地图,而是会和第三方测绘团队展开合作,对商圈、购物中心等地区的停车场进行测绘,制作出专用于自动驾驶系统的高精地图。
有了这种高精地图后,只要车辆还处于高精地图的范围内,便可自主完成绕行障碍物、跨层巡航、自动驶入或驶出车位。整个过程无需人工介入,也没有手机遥控的100m或200m距离限制。
二、智能座舱支持场景编程 语音识别迅速精确
随后,车东西体验了威马W6智能座舱的场景自定义编程功能。
原厂自带的场景模式包括“小憩片刻”、“亲子空间”、“智能节能”、“性能模式”、“高速省心”五个选项,足以覆盖一般消费者可能遇到的大部分用车场景了。
比如在“小憩片刻”场景下,车辆会自动锁上车门,开启车窗通风功能,座椅调后椅背放缓,闹钟定时为30分钟。车主可以自行设定,改变座椅设定、闹钟定时,或者把语音播报唤醒改为播放音乐唤醒。

▲威马W6智能座舱的“小憩片刻”场景
如果车主想要更加个性化的场景设置,可通过手机APP进行场景编程,实现驾驶辅助配置、车窗、座椅、空调、驾驶模式、音乐、氛围灯等主被动软硬件模块的自由组合与设定,并按照自己的用车喜好,制作成不同出行风格的场景卡片。
目前,场景卡片支持的唤醒方式包括方向盘按键唤醒、中控屏点击唤醒和语音唤醒,其中语音唤醒分为唤醒词唤醒和自然指令唤醒两种。
值得指出的是,威马W6的语音交互系统以科大讯飞3.5系统为基础进行了自主研发,依托高通8155芯片和分区麦克风,形成了流畅度高、反应快、功能多的全新WIMI人机交互系统。
这种系统支持连续交互,一次唤醒之后人们可以连续进行15秒的对话,系统都能快速识别并准确反应;这种系统也支持强行打断,哪怕是在车机通过语音回复驾乘者的时候,只要人们想强行打断并说出新的指令,系统也能够及时切换思路。
而分区麦克风让系统能够精准应对来自主副驾位置的不同需求,分辨出真实指令与人们的交谈内容,不会语无伦次或者答非所问。
三、乘坐舒适驾驶畅快 稳定程序成功避免事故
体验过无人自主学习泊车功能和智能座舱后,车东西开始了试驾旅程。这次试驾历时约4个小时,其中80%以上为高速公路。试驾当天有小到中雨,车辆全程行驶在湿滑路面上。
试驾车给人留下的最大印象就是平顺。首先不管是哪种驾驶模式下,动力踏板的响应都非常灵敏且线性。而且这款车采用的是风琴式踏板,驾驶者可以把脚后跟固定在地板上,以脚踝为轴用前脚掌去踩踏板,脚感非常舒适。

▲风琴式动力踏板
美中不足的是,当踏板模式选择为运动模式时,动力踏板的初段响应有些过于灵敏。有时候车辆轧过坑洼时车身会有明显抖动,脚掌难免会有些许位移,如果动力踏板初段响应过于灵敏,可能会导致不必要的加速发生。当然了,当踏板模式选择为舒适模式时,动力踏板的响应恰到好处,足够灵敏却不神经质。
另外,试驾车动能回收的力度分为强、弱、无三个档位可调。在强动能回收力度设定下,松开动力踏板后车辆的减速度适中,既不会刹不住车,也不太容易引起驾乘者晕车。在弱或无动能回收力度设定下,试驾车的表现就像一台非常好开的燃油车,无论是加速还是减速都非常的顺滑。
美中不足的是,制动踏板的位置实在是太高了。每次车东西想要踩制动踏板的时候,都必须要把右脚完全收回来,再抬起膝盖,让整条腿都动起来,才能把右脚掌转移从动力踏板转移到制动踏板上。
这样的操作方式非常麻烦,尤其是在高速公路上时,右脚通常要将动力踏板踩得较深才能让车以较快速度行驶,万一遇到突发情况,恐怕很难及时做出反应。
转向手感的建立特性也不错,在转向模式选择为舒适时方向盘非常轻盈,不会给驾驶者带来什么额外的负担。转向模式选择为运动时,无论是转向阻尼还是回正力矩,二者的随速或随角度增益都是非常线性的,在高速公路上行驶时给人的信心非常足。
减振系统整体上的表现比较好,只是偶尔在车轮轧到小石块、路面不平之处的时候,避振器对于细碎振动的过滤不够干脆,会有一次吸收余振的过程。但余振本身非常轻微,也不是每次都出现。
在面对减速带的时候,减振系统的表现一直都很好,不管是以35km/h左右的速度快速驶过,还是以10km/h左右的速度慢慢开过去,减振动作都是一步到位,没有吸收余振的过程。
当然了,这其中可能也有轮胎的功劳。试驾车搭载的是米其林Primacy浩悦4轮胎,尺寸为225/55r18。这种轮胎属于静音舒适胎,而55的扁平比也决定了这种轮胎本身对于路面振动的过滤效果比较好。
另外,不管是急刹车还是急加速,减振系统对于车身俯仰的抑制也比较有效,试驾过程中没有出现车身剧烈回摆的情况。当然了,这可能也要得益于较好的悬挂几何设计。
值得提出的是,威马W6的电子稳定程序可能避免了一次潜在的事故。
在车东西驾驶试驾车行驶在高速公路上的时候,遇到了一个非常大的水坑。当时车辆以高速公路允许的100km/h限速行驶,水坑出现在车身左侧,只会影响到左轮,不会影响到右轮。
试驾车的电子稳定程序非常给力,及时限制了左侧驱动轮的出力,避免了因一侧驱动轮突然丧失附着力而打滑,进而导致车身横摆引发的交通事故。当时试驾车左侧是护栏,右侧是重卡,不管偏向那一边都是非常危险的。
就在车东西以为脱险之后,路面上又出现了一个差不多大的水坑,还是出现在车身左侧。由于两个水坑距离非常近,当时车速又比较快,还来不及减速车轮就轧上去了。车身左侧还是那片护栏,车身右侧还是那辆重卡。
这一次,电子稳定程序又一次迅速介入,再次避免了事故的发生。
其实,从左前轮轧过第一个水坑,到左后轮离开第二个水坑,前后也就1秒左右。车东西是在听到左前轮方向连续传来急促的、类似ABS系统进行点刹时候发出的“咔咔”声之后,才意识到刚刚可能发生了什么。
从危机出现到解除,没有发生方向盘拽手的现象,车身也没有任何多余的动作,整车的表现就好像没有发生任何事情一样。
结语:威马W6是一款诚意之作
威马W6搭载了感知元件能做到全方位探测,再结合百度Apollo云端平台,除了拥有全速域自适应巡航、智能车道保持、自适应限速和拨杆指令变道等智能驾驶功能,还拥有无人自主学习泊车功能(HAVP),非常适合拥有固定车位的用户。
预计今年年底,威马会通过OTA的方式为W6车型添加无人高精地图泊车功能(PAVP),实现在特定的停车场场景下自主完成绕行障碍物、跨层巡航、自动驶入或驶出车位。
智能车机方面,威马W6采用了高通8155芯片,兼顾强算力、小体积、低功耗。在强大芯片的加持下,威马W6的车机操作非常顺畅,语音控制也比较精准、迅速。算力上的冗余还催生了场景编程功能的诞生,车主可以自行设定驾驶模式、驾驶辅助配置、车窗、空调、座椅调节、氛围灯等软硬件的组合方式。
驾乘感受上,威马W6的动力响应较为灵敏,且采用了风琴式动力踏板,脚感非常好。动能回收力度分为强、弱和无三档可调,关闭动能回收后,这辆车开起来就像是一台很好开的燃油车。
方向盘的转向手感建立特性也做得很好,运动模式下高速很稳低速很轻,舒适模式下一直都很轻。悬挂调教偏舒适取向,能够满足一般消费者对于家用SUV的滤振性的要求。
尤其值得表扬的是,威马W6的电子稳定程序反应非常快,作用非常明显。
综上所述,威马W6是一台比较称职的紧凑级智能纯电SUV,适合对自动泊车功能、智能座舱体验有需求的消费者。



-

凤凰网汽车公众号
搜索:autoifeng

-

官方微博
@ 凤凰网汽车

-

报价小程序
搜索:风车价


.png)
大家都在看







趣图推荐
.png)