激光雷达+自动驾驶,距离终极方案,还差一步

你愿意把方向盘交给车么?
自动驾驶一直都是大家关心的问题,发展多年,但还是有唱衰自动驾驶的声音,说这是个伪命题,实现脱手驾驶太困难了。喷着喷着,就从L1自动驾驶慢慢喷到了L3级,从毫米波雷达换到了激光雷达,有人还在否定已经获得的成果。
但这部分人的否定,不无道理,现在自动驾驶大概分为两派。以特斯拉为首的纯视觉派、另一个是激光雷达派,都能实现L1和L2级别的自动驾驶。再更高级别的自动驾驶,实现起来就存在着一定困难,而且现在的自动驾驶都有一个问题是段时间内无法解决的。
在极端天气下,你更相信自己,还是自动驾驶?
两种主流感知方式
关于极端天气后面会讲,现在你能使用到的自动驾驶技术来自于两种感知方式,视觉派、激光派。特斯拉CEO马斯克是坚定的视觉派,他diss 激光雷达好几次了,也永远不会用激光雷达,所以特斯拉一直用摄像头+雷达实现视觉感知的自动驾驶功能。
特斯拉的Autopilot这套辅助驾驶传感器包括8个摄像头,提供汽车周围360度的辐射范围,最大辐射半径达到250米;还有12个超声波传感器,1个前向毫米波雷达系统。
8个摄像头像素均为120万,且都来自On Semiconductor在2015年发布的产品。这3个摄像头具有不同的功用,其中一颗最远探测距离为150米,起到主要识别功用。第二颗摄像头最大探测距离250米,但视角范围局限,第三颗是为了弥补前两者的视角范围,主要用于获得更大的探测范围。雷达用的是大陆提供的产品,最大监测距离160米。
特斯拉坚持的视觉感知方案,简单说就是用摄像头模拟人眼,收集到的2D画面传给处理系统、进行3D恢复、分析驾驶状况做出预判,最后通过行驶机构执行驾驶命令。
虽然,特斯拉一直鼓吹自己要做全自动驾驶,但实际操作时只能作为L2级别使用;现在,Autopilot能实现的辅助驾驶功能有车道内自动辅助转向、自动辅助加速和自动辅助制动、自动辅助导航驾驶以及自动辅助转向。
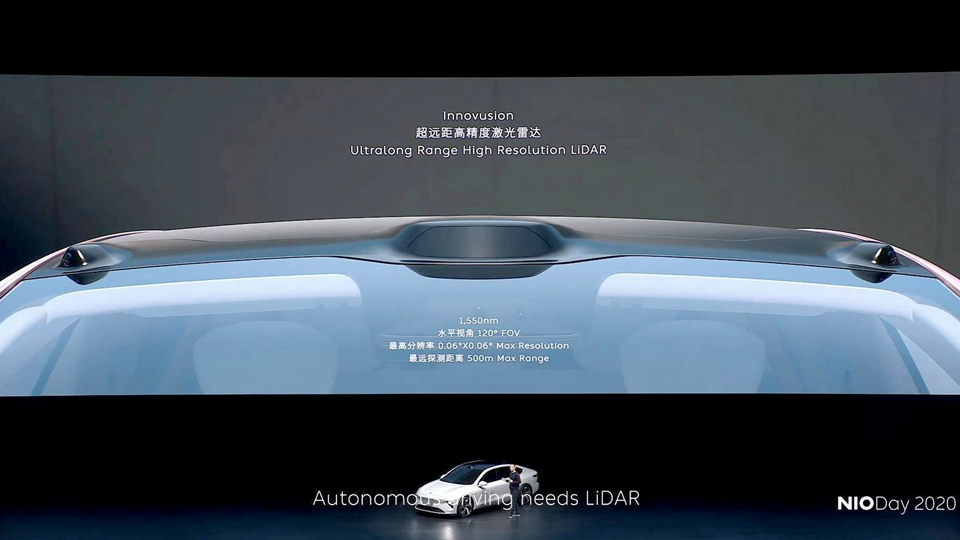
相对更完善的,是今年迎来量产元年的激光雷达。以AQUILA超远距高精度激光雷达为例,120°的超广视角,等效300线的高分辨率,500m的最远探测距离,采用1550nm激光。然后,底层逻辑是通过向被测目标发射激光束,测量反射或散射信号的到达时间、频率变化参数,来确定目标的距离、方位、深度和运动状态等信息,再生成多维信息图像。由于其具有较高的角度、速度和距离分辨率,有着比视觉感知系统更清晰的目标图像,还能同时跟踪多个目标物体。
全天候应用,还无法做到
以上两个主流的自动驾驶感知方案,日常驾驶没问题,但遇到极端天气就是个事儿。说回极端天气的问题,两个主流方案在面对这件事儿时都存在着点儿问题。

特斯拉的方案主要依靠视觉,所以,特斯拉的环境感知是通过基于二维信息重建的三维场景。二维转换三维,必定会有信息丢失,所以特斯拉存在着对远处物体有误识别的情况。举个例子,夜晚、行人、深色衣服+大雾/雨雪天气,然后,毫米波雷达识别人相对不够精准,视觉感知系统又是被环境所限,更别说加上视觉欺骗了。虽然,特斯拉有大量数据用于深度模型训练,但实际应用还是没法保证完全正确的处理所有场景,尤其是极端天气下的场景。而且还有预判失准,错误预估了道路环境和障碍物位置,虽然是小概率事件,但也是存在。
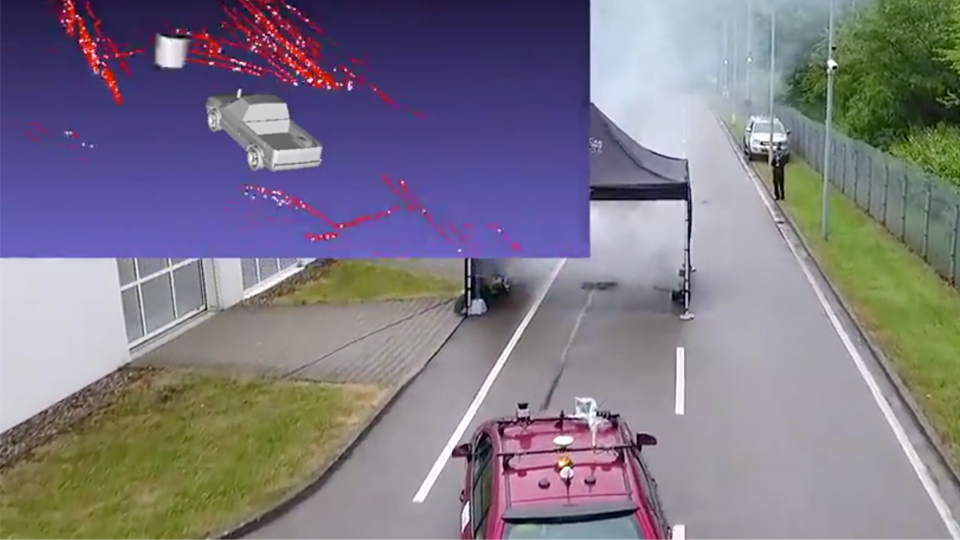
激光方案在这样的环境下也没有好多少,在雨雪雾天气下,障碍物监测能力受限;而且,不同雨滴直径对于激光的影响不同,雨滴越大,激光点云识别效率就越低。而且,在使用1550nm激光对烟雾进行测试时,由于激光没有穿透烟雾,感知系统识别之后认为前方存在障碍物。
也就是说,目前的感知系统还无法成为不受白天或黑夜,不受恶劣天气影响,全天时、全天候的传感器。
红外加入可行,但目前受限
一个大胆猜想,把红外热成像传感器,加到自动驾驶汽车里。这项技术如果在汽车领域大规模应用,极端天气/环境下的自动驾驶应该会更完善。

和激光雷达、摄像头、毫米波雷达这几种主流传感器相比,红外热成像技术捕捉到的图像分辨率更高;而且,由于生物会散发热量,所以热成像可以轻松分辨出生物与其他物体,而且不受天气影响。红外热成像原理,只要物体有温度,都会被探测到红外能量从而转换为电信号,然后生成热图像。如果应用到自动驾驶汽车上,可以解决夜晚驾驶,没有光线的夜晚,照样可以成像。
当然,仅仅依靠红外热成像,是不能解决极端天气下的自动驾驶。举个例子:穿黑衣服的行人,在没有路灯的条件下,依靠可见光的视觉感知不太好识别;那有可能会被毫米波雷达识别,但如果行动速度慢或停滞,那就不能判断物体是否为生物;如果,加入热成像系统,带有体温特征,配合自动驾驶算法做出判定为前方物体为生物,再做出预判,这样自动驾驶汽车在视觉感知系统没有看到,毫米波雷达探测不准的前提下就能确定,前方的物体是生物,且能做出预判。
那么,反推,如果不可见光条件下,表面温度均匀30°的物体放在温度为30°的场景内,用热成像设备可能看不到这个物体。然后,结合激光雷达生成的多维度清晰图像+温度信息,配合算法,计算出在同样温度下的生物,再做出预判。

一个问题,红外传感器为什么没有像激光雷达一样,应用在自动驾驶汽车上。受限于成本、和小型化的问题;目前用于测温的红外传感器,支持同时多目标追踪的普遍价格在7000元以上,而且体积相较于目前车载摄像头来说,偏大。如果解决小型化问题,成本肯定会更高,再配合软件算法和芯片使用在汽车上,成本会更高;奥迪A8L上的夜视系统,仅提供可视化,选配就需要3.2万元。
总结
最后,就目前来看,作为出行工具的汽车,最重要的核心因素是安全驾驶;目前自动驾驶感知系统依靠摄像头提供的视觉、激光雷达提供的点云图,都存在一定弊端。自动驾驶传感器,绝对不是排他性的,而是从属和互补的关系,只有融合才能让自动驾驶系统获得更精准且可信的信息,但面对极端条件下的驾驶情况,如果能更准确的从物体中分辨出生物,从安全的角度来看,非常重要。



-

凤凰网汽车公众号
搜索:autoifeng

-

官方微博
@ 凤凰网汽车

-

报价小程序
搜索:风车价


.png)
大家都在看







趣图推荐
.png)