技术解析:憋了8年的百度自动驾驶,为何依旧左转困难

这几年,百度错过了移动互联网的窗口。所以百度在自动驾驶领域和高精地图上的动作一直都保持着"高频"的操作。百度也是入局最早、最积极的典型。
错过了移动互联网,百度不允许自己再错过人工智能;而商业化落地,最重要的场景,当然是出行市场。对于2013年就开始布局自动驾驶的百度来说,八年时间,自动驾驶功能成了百度手中的一张王牌。
时隔四年,百度的自动驾驶小巴车,迎来了第二代更迭。
阿波龙II带来的更新

百度的第二代阿波龙更新了挺多功能,包括一块儿55寸透明车窗,但我们看的重点绝不在于这些"花拳绣腿"的功能。硬实力增加在了两颗40线激光雷达,和一个"无保护左转"的功能,以及ODD扩大到开放道路上。
挨个分析,先看激光雷达。
阿波龙II用的配置和Apollo Moon用的差不多,两颗禾赛40线激光雷达,单颗成本6万以上。由于不是大规模商用化,而且也不用太考虑激光雷达体积所以阿波龙II没有上半固态的激光雷达。
激光雷达分多线和单线,单线的主要使用场景可能是你家里的扫地机器人,只有一个激光发射器+接收器,投射到障碍物上只有一条横线显示,不能测量整体轮廓和高度。
而多线雷达主要应用在无人驾驶上,计算物体高度信息、对周围环境3D建模。
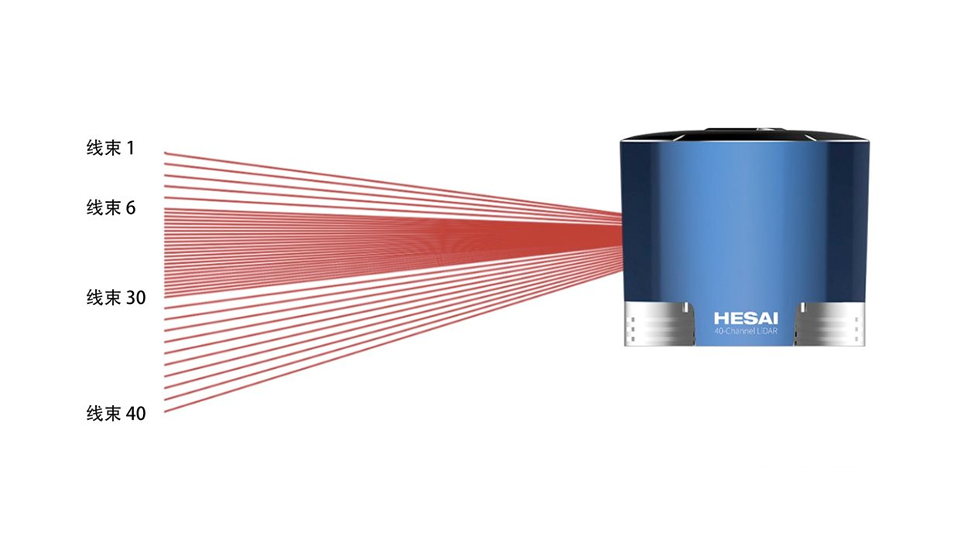
这么理解40线吧,40条激光线去扫描物体,然后每相连激光发射器之间形成的角度就是其角分辨率,阿波龙II用的禾赛40线的角分辨率是0.33°(-6°到+2°),角分辨率1°(-16°到-2°,+2°到+7°);线束1到6,30到40角分辨率为1°,6到30角分辨率为0.33°。
这样做就能更好捕捉远处物体特征,举个例子:禾赛40线在捕捉50米外的一个行人,激光投射在人身上的线束为6条线,而16-beam的传统激光雷达检测出的是一条线。也就是说,1°x0.33°的角分辨率不至于因为视角过大,让激光器射线在远距离时失效。
再告诉你,这台阿波龙II的双40线激光雷达和东风主导的驭科技的无人驾驶车辆的配置相当,后者是三颗40线激光雷达。但,无人驾驶不等于可以有人为介入的自动驾驶辅助功能,所以阿波龙II的传感器不是排他性的,还有四颗环视摄像头+多个毫米波雷达传感器。
无保护左转难点与实现

阿波龙II有一点很引人注意,就是"无保护左转"。不是新技术,特斯拉FSD9.0已经更新上线,其他无人驾驶公司也都在频繁测试。但,无保护左转一直是自动驾驶领域的一道"经典难题"。
左转和右转,就算人类驾驶员开车的时候,也深有体会左转比右转费劲。左转难点在于路口情况的复杂程度+行人+交通标志,自动驾驶车辆来到路口左转就得把所有情况梳理清晰还得做出预判,这对自动驾驶汽车的环境感知与预测能力提出了极高的挑战。
特斯拉给出的解决办法是,单一纯视觉传感器数据高效处理+深度学习+大量模拟训练实现了FSD 9.0上的"无保护左转"。这么理解,环境感知=传感器搜集的数据,预测能力=深度学习后的成果。
这背后又有两套玩儿法,单车智能路线,激光雷达、摄像头和毫米波雷达等传感器的数据收集+算法,分析道路信息进行规划和决策。还有车路协同技术路线,实现车与车、车与道路等多方面的动态的实时信息交互。
至于阿波龙II怎么实现"无保护左转",百度没有给出具体的执行方案,但可以推测一下。百度一直在做的车路协同可能会派上用场,规定的区域内有车路协同会才能实现"无保护左转"。
另一种,阿波龙II和Apollo Robotaxi能力互通,也就是说,阿波龙II能和Apollo Robotaxi获得一样的自动驾驶功能,但我认为应该是其中"部分"功能,毕竟算力有差距,阿波龙II最高算力可能达到372Tops、后者最高算力800Tops。
开进城市道路?需要"远程司机"

虽然可能需要在车路协同的环境下才能完成"无保护左转",但阿波龙II应该能从封闭、半封闭路段开进城市道路。
走进城市道路,背后的逻辑是5G云代驾+Apollo平台。目前Apollo版本已经是6.0版本,讲几个主要亮点。
1Apollo 6.0算法模块上,有三个新的深度学习模型
2集成远程平行驾驶接口
延展第一点说明,感知上Apollo 6.0实现了激光点云障碍物的识别,采用线上对模型的加速处理,识别速度高于70毫秒。预测方面,做了一个低速行人预测模型,针对于低速园区的场景,预测行人低速轨迹。然后规划方面,用大量的真实路测数据,模仿人类司机在一些特定场景下动态避障的能力。融合了感知、预测和规划三方面。
第二点,远程平行驾驶接口。这是为了应急的,例如在自动驾驶无法应对当前路况的前提下;这个功能理解为5G云代驾就行,就是让车端能够接受远程操作员的指令,然后把指令转换成相应的规划和控制指令,实现远程车辆操作。
这两点看完,应该就能理解阿波龙II如何从封闭、半封闭道路开进城市道路。但,考虑到阿波龙II的应用场景,在城市道路里依旧是点对点的短途或者中长途的接驳工作,并不会高频的出入环境复杂的路段内。毕竟百度还有Apollo Moon的无人共享车项目。
总结
看得出,百度想要构建一个多样化的,面向不同场景的自动驾驶生态。百度在自动驾驶领域积累了丰富的经验和能力,而且眼下正在推进商业化落地。这次升级的阿波龙II自动驾驶小巴士,理论上看能力不错,能实现无保护左转、开进城市路段。
但仔细分析,无保护左转应该需要车路协同,但车路协同段时间内肯定无法大面积铺开;开进城市路段,并不能完全保证整条路线完全靠自动驾驶完成,所以设置了"远程控制端口",然后让远程操作员来完成指令。



-

凤凰网汽车公众号
搜索:autoifeng

-

官方微博
@ 凤凰网汽车

-

报价小程序
搜索:风车价


.png)
大家都在看







趣图推荐
.png)