小米汽车技术亮点,在它身上人类真能告别用手停车?

如今造车已不像从前,掌握“三大件”之后就已经稳了。
若是没布局锂矿、电池、芯片、自动驾驶这些上下游产业,造车的困难程度相对于拥有上下游产业的竞争对手会有所增加。而去年3月宣布造车的小米,同时也开始给自己造车铺路,投了芯片产业、投了自动驾驶产业,为了更好的拥有自研技术。
其中小米投资的纵目科技,研发的L4级自主泊车+智慧城市解决方案,似乎让我们从小米投资的一众科技公司中找到了亮点。
自主泊车,L4级第一块拼图?

纵目科技旗下总共有三款技术产品,分别是智能驾驶系统、新能源汽车无线充电系统、智慧城市解决方案。这三个产品都是自动驾驶未来的发展方向,三款产品身上都有自动、引导和互联的标签。
纵目科技所谓的智能驾驶系统,其中包含了L4级自主代客泊车系统,已经在一汽红旗、长安汽车等测试车上开始测试,在公布的视频中能看见功能已经可以实现自主泊车、自主接驾。我们可以把自主泊车理解为L4级自动驾驶的第一块拼图,自动驾驶两大板块无非是“行车”和“泊车”。
自主泊车这个话题,已经从APA发展到RPA再发展到AVP,其中APA和AVP是市场较为主流的功能产品。但落到用户使用体验上往往很难给出好体验感,首先无论是L3还是L4级自动驾驶,都需要人工智能算法大量的运算和强大的学习能力,以应对多变、陌生且复杂的真实环境,泊车和行车都一样。
从AVP功能的发展初期,配套使用的感知硬件有超声波雷达、前视摄像头、环视摄像头,构成了一个融合感知能力。底层逻辑浅聊一下,车侧APA超声波雷达探测车位、算法依靠融合感知计算停车路线、UPA超声波雷达确定前后车距,最终完成自主泊车。

当然这只是理想的使用情况,实际上,AVP的未来发展方向还需要打通车端、场端、云端的三种互联方案。纵目科技的方案更类似于车端和云端的方案,没有选择高成本的场端改造方案。
纵目科技使用的AVP Gen.2车端方案,拥有4个高清环视摄像头、4个4D毫米波雷达、12个长距超声波传感器等硬件。这套设备和算法能让车辆在视觉感知失效的情况下,依靠4D毫米波雷达完成AVP功能。其中,4D毫米波雷达是感知设备中的亮点配置,具备点云成像功能,在测距、测速的精度上有不错的表现,而且比激光雷达的成本更低。
车端拥有先进的感知设备,是车端方案的第一个前提,同时纵目科技还提供了众包地图,完成更多的地图众包之后车端可以适用于多场景,两者的结合对于算法有较高的要求。
云端的AVP方案,底层逻辑是车场云端通过车端传感器数据和信息,与车场信息同步上传云端,云端计算之后输出指令控制车辆。这一方案好处在于,降低了对车端处理器的性能需求、场端改造需求降低;难点在三方的系统通信逻辑,以及通信的可靠性。
以上两种方案是目前最为可行的方案,成本低且利于推广。AVP的终极发展方向可能更偏向于场端,也可以理解为一定区域内的V2X互联功能,但场端是一个高成本的选择。

场端方案之所以成本高,需要在车场内预埋摄像头、激光雷达、高精地图,等于让车场具备了一定的感知能力,从而通过终端计算信息传输给车端。博世和戴姆勒联手打造的场端停车场就是这样的逻辑,好处是高安全性、高精度,但就是改造成本高不好推广。
低速动态V2X,是不是更容易实现?
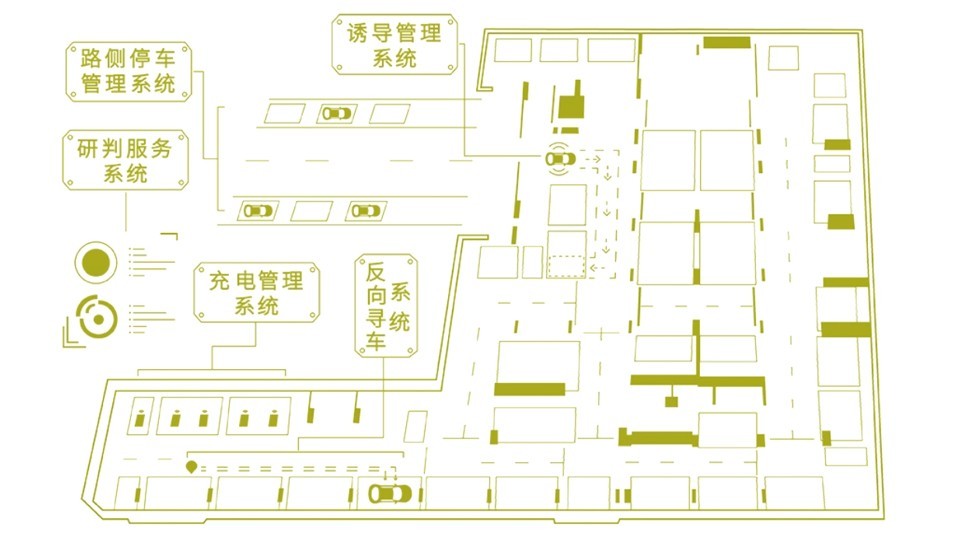
上面提到的纵目科技的三款科技产品,都具备“互联”的功能,车端与云端能够实现互联、车端与无线充电地面端设备实现互联,更高层的发展方向纵目科技还给出了一套“智慧城市解决方案”。
根据纵目科技官网给出的信息来看,这套解决方案依托于云端的高精地图能具备路侧停车管理、充电管理系统、诱导管理系统、反向寻车系统以及预约停车这些功能。以上功能更偏向于静态或者低速的场景下实现,目前V2X的发展现状也还大多停留于测试阶段,由于法规和技术还相对不够成熟,量产或许还需要一定时间。
纵目科技的解决方案,最终能实现怎样的效果(逻辑分析)?
路侧停车,实现车端与基础设施互联(V2I),在地图上显示路侧空余车位;
充电管理系统,上文提到的无线充电地端设备,也是V2I的一种互联;
反向寻车系统,实现了车端与网络(移动设备)的V2N互联;
诱导管理系统,上文提到的车场云端互联(V2N),进行自主泊车/接驾的诱导。

虽然使用场景集中于低速/静态,但具备V2I、V2N的互联功能,由于没有开放环境、高速动态使用场景所以纵目科技产品介绍中暂时没有提及关于车与车(V2V)、车与行人(V2P)的互联关系与功能。我认为打通所有V2X的功能,也绝不是一蹴而就的事情,与自动驾驶同样是阶梯型的发展模式。
支撑以上功能的是一套LBS增强服务平台,LBS我们最容易接触到的功能是“实时公交”,提供了公交线路的规划、实时的信息等。如果放到自动驾驶车辆上,这套服务平台需要完成的是链接3D引擎确保车辆在导航过程中识别方向感;车导/步导引擎,需要给车或用户提供搜索功能、路径规划等功能。
以上,目前都还是V2X的一系列概念和规划,讲几个难点。
第一,V2X可能带来的网络安全问题,拿特斯拉举例,黑客可从手机端App入侵得到车辆定位并进行解锁等一系列的控制(无法启动或驾驶);第二,V2I、V2N的技术支撑需要通过配套设施的升级才能完成,如果大规模落地的话成本和标准都是需要面临的问题;第三,如果加入V2X设备,必然会直接增加车辆成本。
同样在做5G和V2X互联的还有华为,虽然华为不直接造车,但同样也能提供自动驾驶系统的解决方案,在2019年华为就已经开始着手5G+V2X技术的研发。
总结
L4级别自主泊车、V2X互联技术,是智能汽车未来的发展方向,小米从造车之初就开始布局这方面的产业。小米和纵目科技具不具备做好以上L4级自主泊车和V2X功能的实力?
在没有真正落地之前,我们任何人都不能给出一个肯定的结论。但相比于动态的V2V、V2P而言,一定区域内的静态或低速V2I、V2N更容易实现,更何况小米旗下还有5G移动设备、5G基站这些配套产品。L4级的自主泊车,目前最大的难点在于更大范围(多场景)的适用性和算法的优化,根据目前测试的结果来看,最终的实现效果已经达到了较高的水准。



-

凤凰网汽车公众号
搜索:autoifeng

-

官方微博
@ 凤凰网汽车

-

报价小程序
搜索:风车价


.png)
大家都在看







趣图推荐
.png)