小鹏辅助驾驶撞上侧卧事故车,系统啥时候能更靠谱?
小鹏P7撞了,在辅助驾驶启用下。
天黑请闭眼,昨日,一辆辅助驾驶启用状态下的小鹏P7,径直撞上一辆侧卧在路中央的汽车,所幸,该事故没有人员伤亡。
天亮了,昨晚有车撞了,现在有请事故车主和小鹏发言。
车主:上国道后我开启自动驾驶,十几公里后,遇到前方有一个已经侧翻在路上的事故车,车辆未警示,也未做出任何避让动作,我踩刹车也没有反应,车速反而还在上升。

小鹏:车主应当是启用了ACC+LCC(自适应巡航加车道保持),事故因车主没有保持对车辆前方环境的观察并及时接管车辆所致。已积极联系车主,为车主安排代步车,并沟通维修事宜。
交警部门:经调查判定,结论符合小鹏所述,发言完毕。
从现有的发言来看,大概率是车主未规范使用辅助驾驶,恰好又遇到了当下系统搞不定的场景,发生了此事故。换句话,赔钱是不可能的,也是不合理的。
而且从车主的发言中,看到车主使用了“自动驾驶”,这也一定程度揭示车主对自己车辆的功能并不熟悉,事故的发生有部分“必然性”。
此外,车主用“自动驾驶”的字眼,说明小鹏的对此前擦边球式命名的负面影响,消除的还不够。

为了方便理解这个事件,我要切换到“说书人”身份,来给大家举个例子。
在你家小区的出口,有一面透明玻璃墙,物业为了防止有人误撞玻璃,特意在玻璃上涂了个红色的警示带,还给每个业主发了一个小册子,上面写着如何正确从玻璃墙旁边的门进出。
但同时,小区物业为了评选“最干净小区”的称号,又必须把玻璃擦地干净如空气,还承诺到2026年,会替换成一种可自由穿梭的玻璃墙。
正常情况下,大家相安无事,但一天有人走路爱玩手机,撞上了玻璃墙,还和物业起了争执。

你可以说业主没认真走路,也可以指责物业没有真正从用户体验角度出发,为什么要在空气和玻璃之间混淆视听,增大了业主撞玻璃的风险。
这个时候会有熟悉键盘操作技巧的侠士站出来怒喊,渐进式推广空气玻璃就是耍流浪,要么直接一堵水泥墙,要么搞能自有穿行的空气玻璃,还引经据典,西边的谷大人家的院子就是这么做的。
但是大侠有没有想过,直接一堵水泥墙,让那些认认真真走路,在规则约束下享受玻璃墙美好的业主怎么办?
让90%以上认真的业主,为其他业主的不认真买单,这算哪门子的道理,自我约束可不是一种牺牲。
所以,此题无解,爱咋咋地,大家各自摆烂就好。
听完故事,细节还是要盘一盘。为什么一辆静止的车,翻个个躺着系统就不认识了?车企们在想解决方案了么?啥时候能解决?
侧卧的诱惑
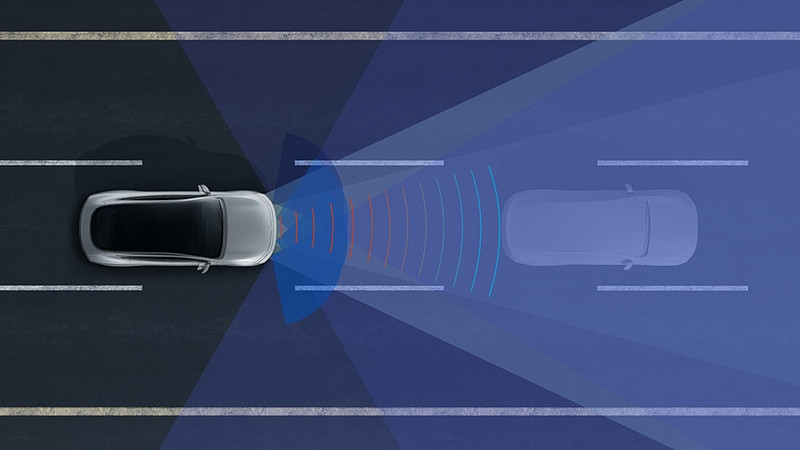
这本质上是一个“狼来了”的故事。现阶段多数车型的辅助驾驶方案,是摄像头+毫米波雷达的后融合感知方案,而这类方案对静止的侧卧车确实“能力有限”,特斯拉也吃过亏。
这种方案可以理解为系统同时用摄像头,和毫米波雷达探测信息,摄像头的视频画面像素高,但缺少距离信息。
毫米波雷达带回来的带距离的点云,但像素极低。这两个信息都会输入做后融合处理。后融合就是两种传感器对同一目标都会输出数据,但系统会针对不同场景不同信息给两种传感器的输出加权重,权重决定着这件事信谁的。
由于毫米波雷达的信息分辨率低,它只能告诉系统,前方X米有怎样速度状态的障碍物,但是不知道障碍物是啥。
针对移动的障碍物还好办,系统多数情况下直接选择相信毫米波雷达就行。但是对于静止障碍物就难顶了。
路上的信息,大多数都是静止的,且不会对行驶路线造成影响,例如绿化带、路牌、龙门架、天桥等等。这就如同“狼来了”的故事,无效信息给的太多,系统就选择直接过滤了。
但路面环境的静止信息。除了上述之外,还有很多真敌情,例如静止车辆、桩桶、玩123木头人的小朋友,以及这次的侧翻事故车。

因此,现阶段的做法就是通过机器学习,识别路面上各类物体,给他们分类,然后判断是否相信毫米波雷达返回的距离信息,遇到该刹车的障碍物就刹车,其余的静止信息继续忽略。
小鹏XPilot3.0已经对各类车尾很熟悉了,对桩桶也做了学习,如果这次的车是正常姿势,或者侧卧的车主能及时在道路前方摆上桩桶,那系统大概就能识别并提醒接管了。
但是侧卧的车辆,着实是为难AI了,这就是给一个从没见过螃蟹的人一只螃蟹,他当然束手无措。人类不能很难对认知范围外的事物有正确看法,机器也一样。
这是病,得治
这种状态很危险,所幸车企们已经在行动了。我们回到问题的关键,摄像头分辨率高但没距离信息,毫米波雷达有距离信息但分辨率低,那能有一个带距离的高像素信息不就结题了?
特斯拉、小鹏、蔚来、理想等车企都沿着这条思路做了方案。特斯拉的方案是去掉毫米波雷达,通过单目立体视觉算法来估算出前方道路的距离信息,从而规划出安全的可行驶区域。
小鹏、蔚来、理想等多数车企,选择了激光雷达,一种本身就能输出高分辨率点云信息的传感器。

小鹏P5和小鹏G9,以及换代的小鹏P7,都将搭载半固态激光雷达,这通过激光点云算法就能输出一个精准的障碍物方位,及可行驶区域,能够有效防止此类的碰撞。
目前小鹏G9、理想L9、蔚来ET 7、蔚来ET5、蔚来ES7等车型都搭载了半固态激光雷达,10%反射率下最远探测距离在150m-200m之间,也就是说最少能提前150米看到黑色的静止车辆。
而这一次,系统不用去管它是正着的,还是侧卧的,减速停车或者变道就完事了。



-

凤凰网汽车公众号
搜索:autoifeng

-

官方微博
@ 凤凰网汽车

-

报价小程序
搜索:风车价


.png)
大家都在看







趣图推荐
.png)