激光雷达该装哪儿?理想和集度的老板在线掰头
中国汽车圈如果没有李想,一定少了很多的瓜。

这一次,理想汽车创始人李想又在微博上,和集度汽车CEO夏一平关于激光雷达的安装位置,在线“掰头”。
事件的起因来自集度的一场媒体沟通会,AutoLab也参与了这场线上分享。会上集度公布了首款汽车机器人概念车的最新进展,其中最重磅的在于公开了两颗位于车前盖的升降式激光雷达。
紧接着在《42号车库》关于集度沟通会报道的微博中,李想发表评论称,在车顶上放一个和在机盖或保险杠放2个,性能上没有任何区别”

同时,李想还指出了机盖上布置激光雷达的种种弊端,称车顶才是最优解。李想认为激光雷达装车顶唯一的缺点是和“机动战士-高达”撞脸了。
不少网友表示,李总的这番言论有点辱达了,这明明是头顶被人打肿了,干嘛扯上高达?不过,我搜了下高达的图,头顶确实像是装了个激光雷达,疑似采购了Velodyne Velabit 。
对于李总的“友善探讨”,集度汽车CEO夏一平也迅速在微博回复了对方辩友。
夏一平提出,120°的FOV和180°的FOV还是不一样的,产品能力、功能体验、安全性上都还是有差异的。
此后李想又更新了一条评论,认为集度量产的时候如果采用2-3颗激光雷达,大概率会布置在保险杠或翼子板上,并认为放在这个位置,过不了最新的行人碰撞法规。
120°和180°看到的画面差别有多大?
数学题大家都会,180°≠120°,但是不知道车上,有啥不一样,我还是给大家简单画一张图,方便大家理解。
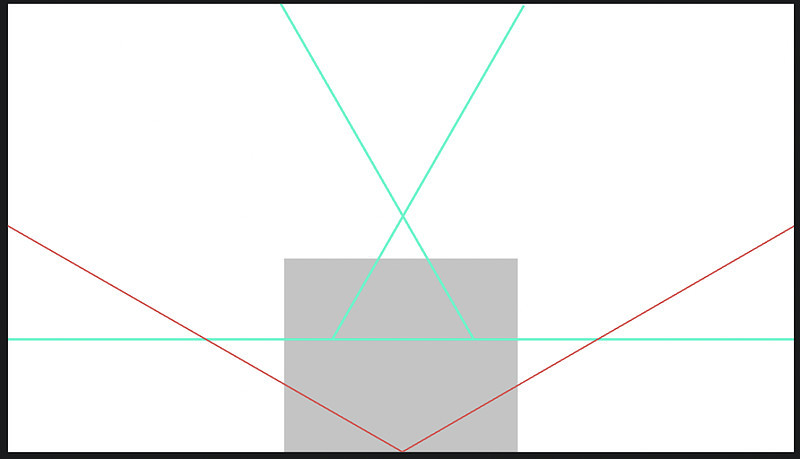
图里红色是理想L9的角度,绿色是集度首款机器人的角度。虽然比例尺没那么精准,但初步看起来扫到的视野区域确实不一样,也都各自有各自的盲区。
当然,这只是从水平FOV考虑得到的盲区示意,并没有考虑到垂直FOV。理论上来说,前盖的位置布置激光雷达,会被遮挡部分点云,因为这块基本是个平面。
但是我们通过集度放出来的布置位置来看,集度专门在激光雷达布置的位置做了个微拱形的设计,既解决了点云被遮挡的问题,又让外观看起来更有超跑的气势。

此外,我们通过集度此前放出的设计图来看,集度汽车机器人的A柱夹角比较小,和理想L9这类SUV的设计有很大差异,因此两款车在激光雷达布置上自然有一定差异。
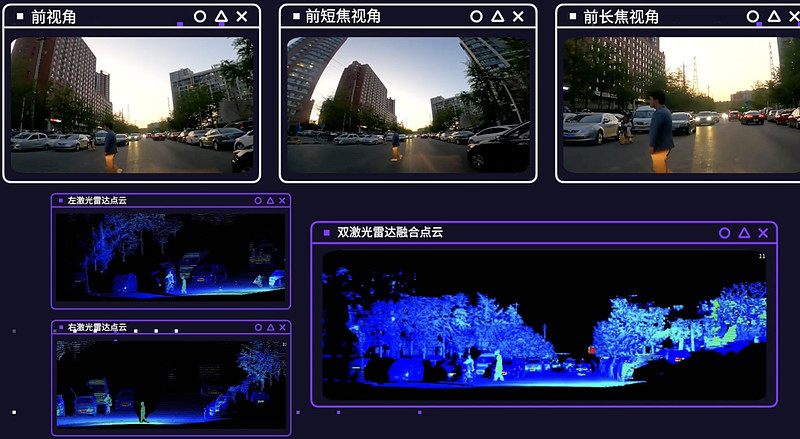
我们也来看一张集度这套传感器,对同一场景下,摄像头拍到的画面,与2个激光雷达以及合成拼接后的画面。
当然,也对比下理想L9的摄像头和激光雷达实拍画面。

可以看出两款车的激光雷达画面,基本看到激光雷达画面都是略大于前视摄像头画面的。肉眼来看,着实很难说清两个点云画面信息的完整度和丰富度有多大差异。
除了视角和盲区的差异之外,李想也提到行人碰撞和震动控制的问题。集度为了将激光雷达集成在前盖位置,也专门做了可升降设计,整体成本肯定是高于直接COS 高达的。
那为什么集度又非要舍近求远呢?
激光雷达布置要跟着功能场景走
现阶段除了集度这种在前盖做升降式的,理想L9这种顶部瞭望式的;还有小鹏保险杠左右角各一颗的布置;华为ADS保险杠上正前左前左右各一颗的。
还有路特斯ELETRE正前、正后、正左、正右各一颗的,以及毫末智行NOH上专门扫向左前和左后的激光雷达布置。
可以说,激光雷达布置都没有固定范式,各家都为了适配自己的功能需求,选择了不同的布置方案。各个方案之间可能存在成本和实现难度的差异,但并不存在优劣。

总体而言,放在顶部视野更高,布置成本也最为可控,但近场低矮障碍物会有一定盲区,因此设计取向上会以正前方中远距的感知为主,例如提升前向AEB的能力,以及提升ACC下对静止障碍物的识别,提升领航辅助驾驶功能的安全性。
激光雷达布置在保险杠位置,垂直方向上视野盲区更小,对近场低矮障碍物的识别更好,例如现阶段看到做高速公路堵车场景(60km/h以内)L3自动驾驶的车型,例如奔驰EQS,就会选择在保险杠位置正前方集成1颗激光雷达。
所以,激光雷达集成在哪个位置或许真没那么重要,也更没啥最优解,早点把功能拉出来给大家伙溜溜才是正经事。



-

凤凰网汽车公众号
搜索:autoifeng

-

官方微博
@ 凤凰网汽车

-

报价小程序
搜索:风车价


.png)
大家都在看







趣图推荐
.png)