毫末智行发布城市NOH功能,长城系智驾全面起飞
给时光以生命,给岁月以文明
毫末智行(长城旗下自动驾驶公司)用《三体》里最破圈的这句话,为第五届AI Day画上了句号。正如毫末智行CEO所说,毫末智行是一家“长在三体上的公司”。
马斯克和特斯拉有他们的“第一性原理”,毫末智行也有他们的“思想钢印”。每一种解决方案,都是建立在一些关键假设之上,可以叫第一性原理,也可以叫“思想钢印”。
“思想钢印”出自《三体》中的第三位面壁者希恩斯,指的是一种可以植入人类大脑中,使其无条件认同的“关键假设”。

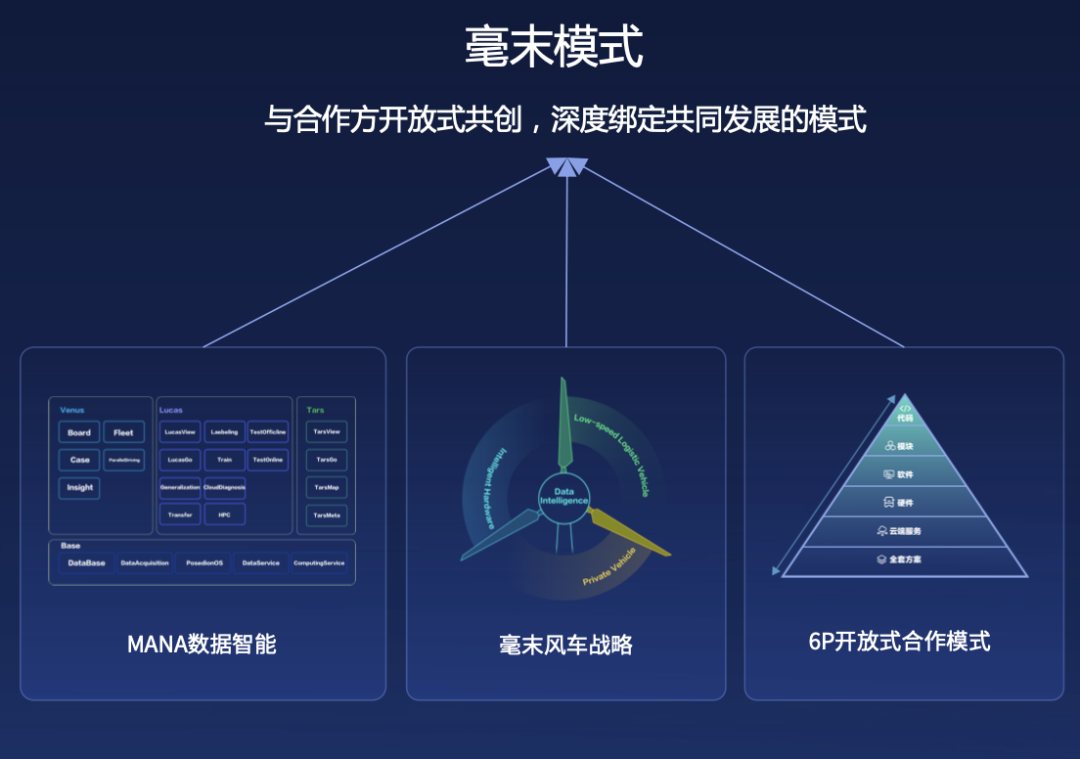
毫末智行基于认定的“思想钢印”,又整理出了一套智能驾驶解决方案 ——数据数据体系MANA。有意思的是,MANA这个名字的灵感,也是来自《三体》
第四位面壁人罗辑,在在结冰的湖面上散步,掉入冰窟,在窒息的边缘,他顿悟了宇宙社会学真相,总结出了黑暗森林法则,从此变身执剑人,使地球文明暂时脱离了三体文明的威胁。

这个湖是新纪元的起源,在三体宇宙中意义飞凡,可惜刘慈欣并没有给这个湖取名字。在中国新疆有一个湖,和三体描述的很像,叫做玛旁雍措(Lake Manasarovar),毫末的数据智能体系正是取名于这个湖。
熟悉三体宇宙的伙伴,一定会感叹于毫末智行这套命名的妙不可言。
聊完毫末智行的三体宇宙,我们再来回顾这场AI Day 上释放的最新进展,毫末城市NOH辅助驾驶系统。
如视频所述,这是国内继华为ADS、小鹏XPILOT3.5之后,第三个开放给媒体体验的城市领航辅助驾驶系统。

这套系统将于今年6月通过WEY摩卡的新车型交付,未来还会搭载在WEY、坦克、哈弗等众多长城旗下的品牌车型上。当然,如果其他车企愿意使用的话,也是可以合作搭载的。
重感知路线的弯道超车
毫末城市NOH最大的特点便是“重感知,不依赖高精地图”。这在智能驾驶领域算得上是一次创新的尝试。
高精地图能够提供丰富的先验信息,必然事半功倍,但目前城市级高精地图不仅存在鲜度无法保障的问题,还因为审查问题影响了交付的节奏。
华为ADS、小鹏城市NGP都只能做到先在北京上海等一线城市交付落地,后续推广速度上也较为缓慢,全国有300多个城市,想要实现城市级高精地图覆盖基本是不太可能。
毫末的方案由于不依赖高精地图,因此不受审批的干扰,在城市覆盖上也可以实现超100个城市的覆盖。

特斯拉也是未使用高精地图,但它使用了视觉众包地图的方式提供先验信息,视觉众包此前在国内便属于灰色地带,随着这一轮网络安全审查的推进,众包建图变得更加前途未卜。
毫末城市NOH目前是向某图商定制了一款SD Pro地图,也能够提供车道线拓普关系在内的先验信息,我们可以理解为这是一套2D的,带车道线信息的导航地图。

这套地图是车辆实现导航路径规划的基础,但要实现准确地按照导航自行选择最优路线行驶,执行变道、加减速指令,还需要感知和决策控制上的“真本事”。
“重感知”对硬件要求更高
首先是硬件上,毫末这套传感器方案搭载了3个前向800万摄像头,1个正后800万摄像头,左右的侧前、侧后是800万的广角摄像头。
此外,毫末在车身左右两侧还搭载了2颗速腾聚创的MEMS激光雷达M1,M1是我们的老朋友了,但是被安装在这个位置,还是第一次见。
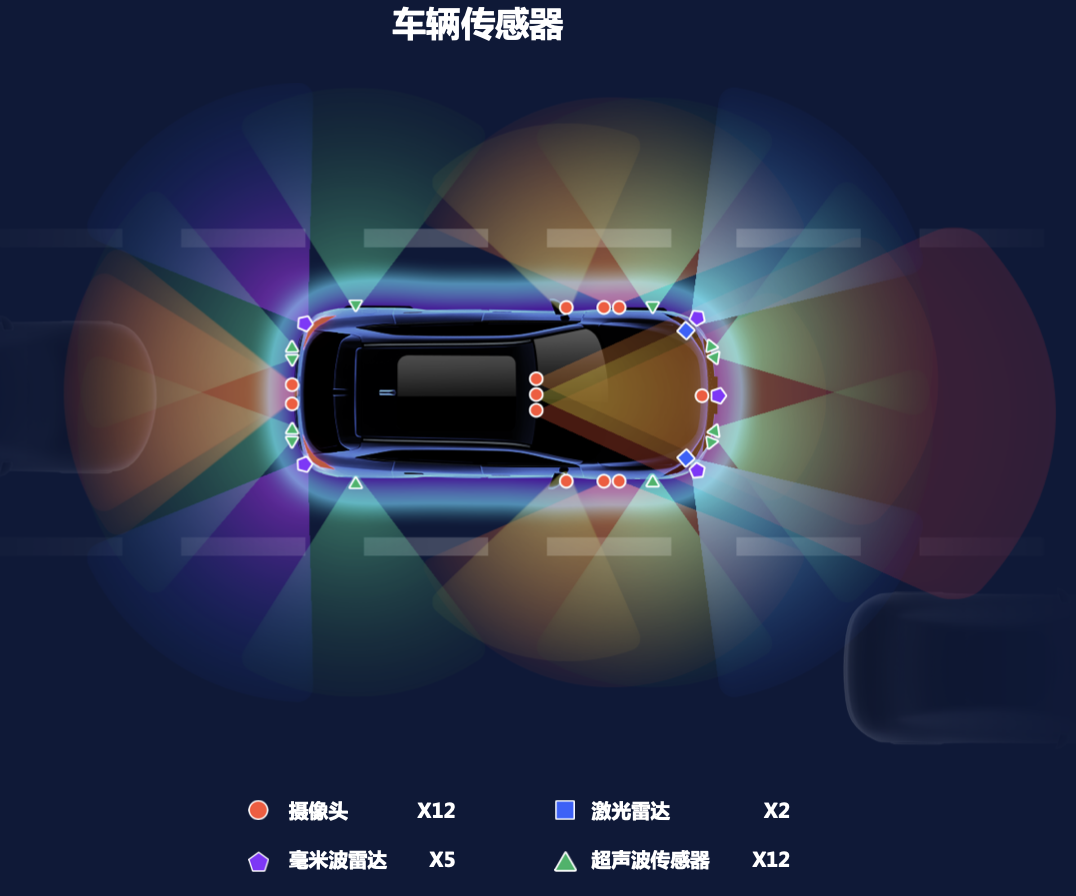
其他家的激光雷达都是尽可能拍前面,甚至还要放车顶来提升探测距离,或者通过多颗FOV的拼接实现更大的水平视场角。
毫末的这套方案比较凡尔赛了,有激光雷达,嘿我就是不往前扫,就是玩儿(用作对左右侧后的补盲)。这很大程度显示出毫末对自家视觉算法的自信,依靠视觉就能感知前向环境的深度信息。
这个安装位置,我猜测对应的功能需求是,让系统执行向左向右变道时,决策更及时也更安全。其实想想也觉得很有道理,我们对待前向障碍物,处理的需求普遍没有那么急迫,基本都是减速加速,而且800万摄像头在探测距离上比现阶段的激光雷达更有优势,能在更远距离外检测到障碍物,处理更灵活。

然而在纵向处理上,往往都是急活儿,例如我们避让前车时,需要准确知道左后方有没有迅速接近的车辆,我们的避让和变道到底安不安全。
此外毫末还搭载了自研的“小魔盒3.0”,算力达360Tops,后期可以升级到四芯片1440TOPS算力版本,足以满足更高级别功能的算力需求。
“重感知”对算法能力要求更高
毫末将MANA分为感知智能和认知智能,感知智能就是我们常说的识别、预测、融合,而认知智能大概对应我们常说的规控加上模型训练的部分。
首先在感知上,在毫末上一届AI Day上就提出过亟待解决的问题:“时间上的感知不连续、空间上的感知碎片化”。
短短近4个月的时间,毫末就给出了基于Transformer的解决方案。Transformer更接近于人类对世界的理解方式,可以提出一个统一的指针来拉齐各部门(传感器)的跨部门协作,格局打开,自带全局视野。

AI Day上,毫末智行单独介绍了自研的“BEV Transfomer"算法,可以利用Transformer的优势,将遍布车身前后左右的摄像头拼接并转化为一个俯瞰视角,也就是相当于我们玩赛车游戏时用到的上帝视角。
玩过赛车游戏的伙伴应该都能感受到,上帝视角下我们做决策判断会灵活,掌握的信息也更直接更完整,虽然代入感差点,但更容易跑出好成绩。
毫末举了个车道线检测的例子,来说明BEV Transfomer的优点:更稳定、信息更完整。此外,现阶段我们对激光雷达感知结果的使用,也是通过PointPillar算法转化为上帝视角(BEV)。
因此如果视觉和激光雷达点云都被映射在同一坐标轴中,且利用Transfomer自带社交牛逼症式的融合能力,理论上是更便于实现真正的激光雷达、摄像头前融合感知,那系统对环境的感知就会有质的飞跃。
训练才是智驾制胜的重点
智能驾驶经过这么多年的发展,在感知上的算法越来越多,很多都还是开源的,而决定于能不能用好,如何用好,还需要大量的数据训练来优化模型。
毫末智行在训练上和阿里有密切的合作,首先是使用阿里达摩院的M6超大模型做预训练,M6达到了1750亿的参数量,涵盖了我们在互联网上的多数信息,例如购物、娱乐等,他核心的功能是用来“猜你喜欢”。
毫末智行会通过包含人类文明泛化信息的大模型做预训练,再通过阿里云来做自动驾驶数据集的专项训练,从而能够让模型的学习效果更好。

此外,用AI来给训练的数据集打框框打标签,是现阶段人工智能发展的大势所趋,也是真正拉开人工智能演进速度的关键技术。毫末智行透露现阶段自身的自动化标注能力,可以将标注的成本降低80%以上(相较完全人工标注)。
训练的工具有了,训练的“教材”也有了,剩下的就是对着教材来让人工智能学习,如何在对应的场景下做出最合理的控制,这也就是我们常说的规划控制。
目前通过体验来看,毫末智行在复杂的城市环岛中,表现非常亮眼,对其他车辆的行为预测,以及本车做出的规划控制都非常精准。可以说如果闭上眼,车上的乘客可能很难区分出是人在开,还是机器在开。
这样的效果,便是来自于大量的数据训练。截止2022年4月,毫末辅助驾驶行驶总里程700万公里,而未来两年还会有100万台车加入,提供更多的数据。
毫末智行和特斯拉一样,会在车上使用影子模式和特征触发器来收集供自动驾驶训练的数据,简单说就是,它会将一套最新的待测的算法推送到车辆,实际开车过程中,这套系统会模拟感知和决策,但这些决策不会在车上起作用,整个过程中车主是无感的。
这就好比是这套系统在平行宇宙里开车,然后将AI开的和人类车主自己开的做对比,如果决策的差距很大,就会上报这段数据。
当然需要放心的是,这些数据都是经过脱敏处理的,可以完全保障信息安全。
背靠长城,毫末NOH 在上车推广速度上有天然的优势,成为拥有全球第二大智能驾驶数据集的企业只是时间问题。
如果数据越多,学习效率越高,系统越智能的“思想钢印”是正确的,那毫末在智驾上的表现着实未来可期。



-

凤凰网汽车公众号
搜索:autoifeng

-

官方微博
@ 凤凰网汽车

-

报价小程序
搜索:风车价


.png)
大家都在看







趣图推荐
.png)