蔚小理已经用上的自动驾驶技术,小米2年后再用,晚不晚?

罗永浩宣布将从明天开始,退出所有社交平台,将再次埋头创业去了。作为被称为“行业冥灯”的罗永浩,在屡次跌倒后,都坚强的爬了起来,还能继续创业,这种精神绝对值得我们敬佩。当然,我们今天说的也是一位一直创业的企业家,而这是他今生的最后一次创业,他就是雷军,小米汽车是他自述的今生最后一次创业,而这也承载着无数人的期待。最近,小米汽车又有一系列引人关注的专利被公布出来,结合这些专利,我们可以来一起看看,小米汽车进展到哪一步了?

从专利能看出来,小米汽车的动力形式不止纯电?
这一次的专利曝光依然是围绕着小米自研的自动驾驶系统而展开的,首先是关于“自动超车方法、装置、车辆、存储介质及芯片”。如今,决策规划算法是自动驾驶技术框架中的核心技术,其中超车变道算法是决策规划算法的重要组成部分,通过超车变道算法控制车辆完成自动超车。相关技术中,超车变道算法主要根据前车速度、前车距离等行车数据,并使用变道加速收益模型来判断是否执行变道超车。但该判断方式未考虑车辆类型对变道时机和变道行为的影响,导致同样的超车变道逻辑难以适用所有类型的车辆,最终导致超车时用户体验不佳,甚至无法实现变道超车。
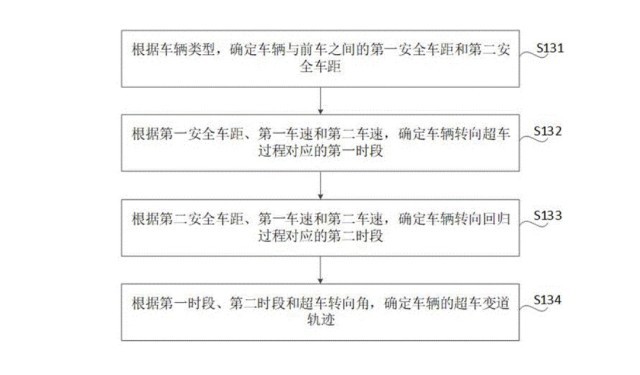
响应于车辆与前车之间的车距小于预设距离阈值,确定前车的车辆类型和第一车速,根据车辆类型、第一车速、车距和车辆的第二车速,确定车辆的超车决策结果,在超车决策结果小于预设决策阈值的情况下,根据车辆类型、第一车速、车距和第二车速,确定车辆的超车变道轨迹,基于超车变道轨迹,控制车辆执行超车。从而根据车辆类型和相关行车数据,确定车辆当前是否执行自动超车,在通过算法确定车辆需要进行超车时,通过车辆类型和相关行车数据,生成车辆对应的超车变道轨迹,使车辆根据该超车变道轨迹进行自动超车。将车辆类型作为算法的必要考虑因素,使车辆能够基于当前实际情况,准确的执行超车变道过程,给乘客带来更好的自动驾驶体验。

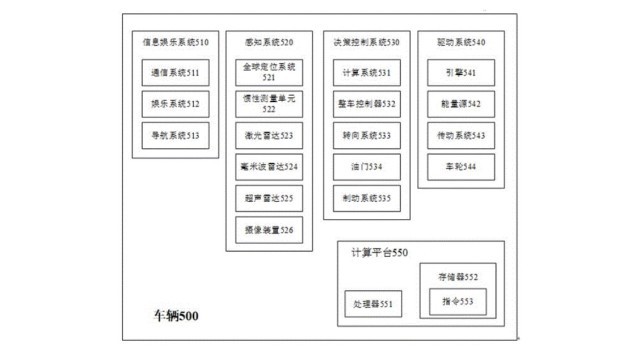
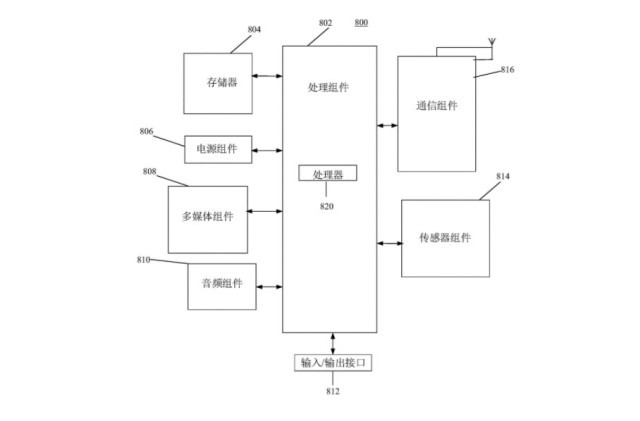
在专利中,再一次提及了车辆的自动驾驶感知硬件,是通过激光雷达、毫米波雷达、摄像头和惯性测量单元等,这些硬件在算法的统筹下,让车辆在预设的阈值内完成超车动作,我们还注意到了专利中所说的“车辆500”由内燃机将燃料转化为机械能,也就是说小米汽车可能会有燃油、增程式和纯电等动力形式,但最后专利中提到:车辆500可以为各种类型的行驶工具,例如,轿车、卡车、摩托车、公共汽车、船、飞机、直升飞机、娱乐车、火车等等,本公开实施例不做特别的限定。当然,小米汽车也确实不一定就完全是纯电车,多元化的产品策略对于增强品牌的竞争力有着很强作用。
其实像小米自动超车这种类型的专利,百度阿波罗、广汽、东风汽车等公司也都有类似的专利,但对于阈值设定的不同,方案的细微不同也能让它们相互有差异。目前,像特斯拉最新的FSD已经在海外开通了自动超车的功能,国内新势力蔚小理也都有类似的功能正在落地,自动超车对于L3级自动驾驶来说,可能用处还不大,目前已上路的L3还是以跟车为主,比如奔驰。但对于今后L4-L5来说,自动超车功能相当重要。

百度“养虎成患”?小米汽车将配百度高精地图
小米的另一项发布的专利,是关于解决目前自动驾驶领域稳定安全的一个重难点问题——躲避障碍物,专利叫做“路径规划方法、装置、存储介质及车辆”。
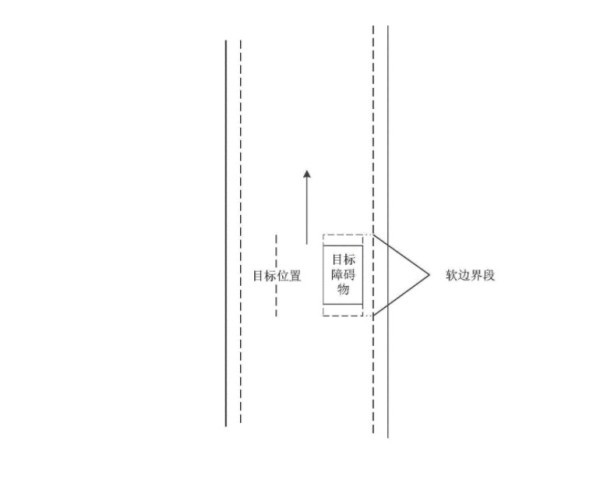
自动驾驶系统的路由模块基于车辆位置、目的地位置、以及高精地图规划车辆需要经过的路段。运动规划模块根据路由模块输出的信息以及感知模块等提供的信息生成安全舒适的行驶轨迹发送给车辆控制模块。车辆控制模块根据行驶轨迹控制车辆行驶。对于路段上的障碍物,尤其是高速运动的障碍物,出于安全考量,运动规划模块采取变道行驶或者减速刹车的策略来规划行驶路径以避免车辆与障碍物碰撞。然而这种避障方式导致车辆行驶的平稳性较差。也就是会出现突然的高速闪躲,让车内乘员始料未及,可能导致危险情况发生。
之前,我们在上一次的解析文章中提到,小米将采用高精地图,而这一次的专利中,小米直接表明了将采用百度的高精地图:自动驾驶车辆采用的路径规划方法是百度Apollo EM Motion Planner提供的方法。Apollo的功能架构包括高精地图模块(HD Map),用于提供高精度地图信息。定位模块和感知模块用于提供当前车辆周围动态环境。预测模块用于提供预测的未来环境信息。路由模块用于基于专用的路由地图,输出车辆在从出发点到目的地的过程中经过的所有路段。运动规划模块,用于接收所有信息生成安全舒适的轨迹发送给车辆控制模块。

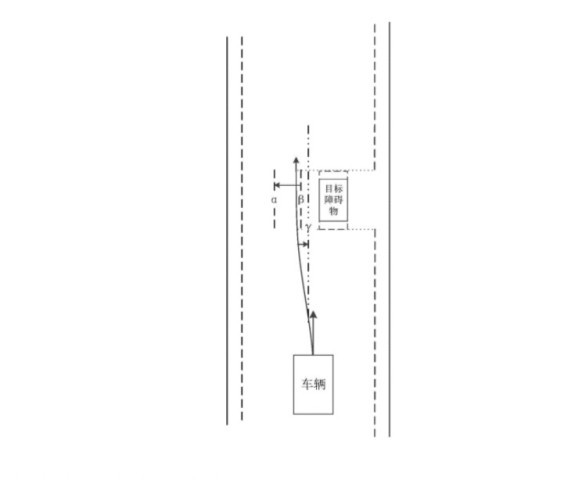
其中,运动规划模块对于路段上的障碍物,尤其是高速运动的动态障碍物,出于安全考量,运动规划模块会采取变道行驶或者减速刹车的策略来规划行驶路径以避免车辆与障碍物碰撞。然而,由于较大的换道动作、或者由于减速刹车带来的速度变化过快所导致的大幅度动作会导致车辆行驶很不平稳。例如,急刹车、急剧减速、猛然变道等所带来的车辆行驶不平稳现象。所以车辆会在探测到障碍物后,用复杂的函数运算确定一个物体的软边界,再通过车辆自身位置和后续探测数据,经过其他函数运算确定硬边界,从而提前规划躲避路径,让躲避障碍物变得更轻松,车内驾乘体验更好。
但我们看到的,这一次主要针对的是移动障碍物,没说是卡罗拉、轩逸和雷凌,不要过度联想......但现在的自动驾驶对于固定的静止障碍物的识别度并不够,上一次特斯拉撞飞机,蔚来、小鹏高速上撞故障车,都是静止物体的锅,所以也希望更多企业能够对于解决静止障碍物的躲避识别,做出更多研究和开发。

小米的绿波通行,会更顺畅?
小米的专利中,还有一点也是我们上一次文章中说中的,关于车路协同的技术。在自动驾驶技术中,城区无人驾驶是一个非常难解决的场景,一是由于城区高精度图制作成本高,建图的精度有限,即使构建起来的地图也只是包含道路相关元素信息,没有考虑道路的更多相关动态属性。二是城区交通复杂,车道线、红绿灯等规则多变且繁复,同时道路又存在遮挡、磨损等多样性情况。在这种情况下,了解道路元素更丰富的信息,会有利于无人驾驶城区场景的落地。其中,最重要的就是红绿灯的问题,虽然现阶段对红绿灯的识别检测问题已经被广泛研究,但是尚未有自动获取每个红绿灯的倒计时的方法,无法准确的估计城区路口每个红绿灯的倒计时状态,进而无法满足高精度的实时观测交通状态,阻碍城市交通网的建立,影响用户体验。
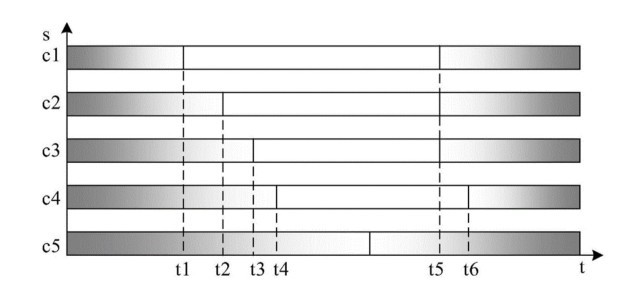
这项专利的实施,先要获取待计算的交通灯所对应路口的历史车辆数据,再根据历史车辆数据,确定至少一个目标车辆的车辆数据,然后基于至少一个目标车辆的车辆数据,确定每个目标车辆在路口的停止时刻和启动时刻,最后根据每个目标车辆在路口的停止时刻和启动时刻确定交通灯的红灯时长。与现有技术相比,通过检测路口车辆状况,自动获取倒计时长,为城市动态高精地图的每个红绿灯提供倒计时属性,进而规划出合理的速度和路线,提高自动驾驶技术的精度,提升交通效率和乘客的舒适性。这项技术对于落户在亦庄的小米来说,验证实现起来较为容易,因为亦庄有着目前国内几乎最完善的车路协同基础设施,每个红绿灯上都有车路协同的接发设备,百度的阿波罗已经在这里跑了很长时间了。
小米的一个个自动驾驶专利密集地被审批、上线,可以看出小米软件研发速度相当之快,这一次还有关于车道保持、多相机模组配合的专利,我们之后也会再进行解析。

2022年已经过半了,离雷布斯的新车量产满打满算也就还有两年时间,新势力们最近抢眼的表现或许会促使小米造车再度提速。这一次我们已经明确看到了,小米汽车将使用百度的高精地图技术,而百度的亲儿子集度,也和小米一样落户在了亦庄,两个实力更强大的新势力造车企业,会在北京亦庄的土地上展开角逐。



-

凤凰网汽车公众号
搜索:autoifeng

-

官方微博
@ 凤凰网汽车

-

报价小程序
搜索:风车价


.png)
大家都在看







趣图推荐
.png)