蔚来眼中的激光雷达
激光雷达已经成为辅助驾驶的核心部件之一,关于激光雷达,蔚来的产品工程师分享了一些信息。
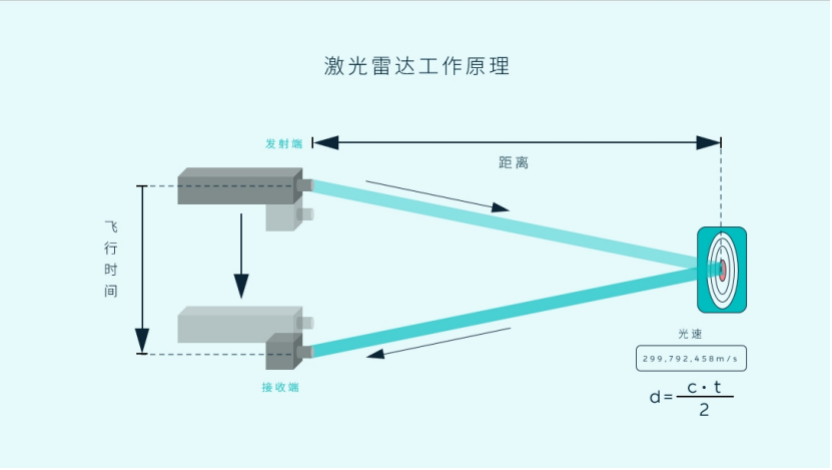
激光雷达的原理是什么?如今智能电动汽车上搭载的激光雷达,多为LiDAR(Light Detection And Ranging)它包括一个单束窄带激光器和一个接收系统。激光器产生并发射一束光脉冲,打在物体上并反射回来,最终被接收器所接收。接收器通过测量光脉冲从发射到被反射回的传播时间,计算出车辆与反射物之间的距离。激光雷达发射并接受若干光脉冲,通过计算自身与周围障碍物之间的距离,输出三维空间数据。
在自动驾驶感知方案中,毫米波雷达与摄像头的组合较为成熟,目前在中高端车型普遍配装。但随着道路状况越来越复杂,当前技术条件下,摄像头+毫米波雷达的方案在面对强光、隧道逆光、黑夜、未经算法训练的物体等场景下难以可靠识别障碍物。

此外,目前摄像头、甚至多目摄像头,配合视觉算法,依然较难提供自动驾驶感知层面至关重要的深度信息,目标物体越远,深度信息精度越低。ET7搭载了Aquila蔚来超感系统,配备33个高性能感知硬件,其中包括1个超远距高精度激光雷达,7个800万像素高清摄像头、4个300万像素高感光环视专用摄像头、1个增强主驾感知、5个毫米波雷达、12个超声波传感器、2个高精度定位单元和V2X车路协同。

“瞭望塔”式布局既是创新,也是挑战。无数次设计迭代, 让传感器无缝融入车顶在车顶位置布置了超远距高精度激光雷达和800万高清摄像头,确保视野更开阔。激光雷达的布置既要满足设计的美观需求,也要充分保证性能。针对激光雷达这一最重要的组件,设计师采用了梯形轮廓加圆角处理的包裹设计, 通过流线型平滑过渡的包裹手法设计摄像头,令其造型更流畅。

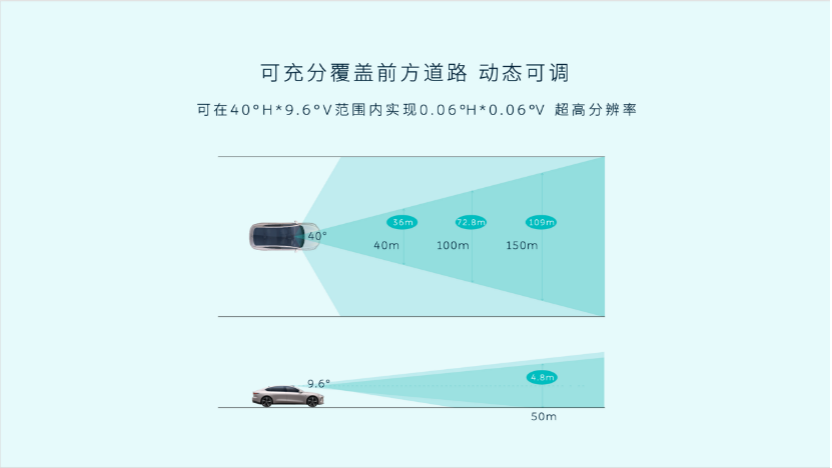
蔚来ET7搭载了来自Innovusion的超远距高精度激光雷达,最远探测距离达500米,10%反射率下探测距离达250米,拥有120°超广水平视角和0.06°*0.06°超高分辨率,是全球首款实现大规模量产的1550nm激光雷达。通常人眼可见光波长范围为380nm~760nm。远超人眼识别范围的1550nm激光无法在人眼视网膜上聚焦成点,且在通过眼球过程中大部分都会被水吸收,因此几乎不会对人眼造成危害;而905nm激光则更接近可见光波长,容易在人眼视网膜上聚焦成点。为保护人眼安全,通常905nm的激光雷达的光功率上限较低。
具有更好人眼安全性的1550nm激光雷达可允许输出更高功率,实现更远探测距离。
此外,1550nm波长激光抗干扰能力强、光束准直度更好、光源亮度高,这几个优点也让激光的发射和接收更高效,可以实现更精细的物体识别。

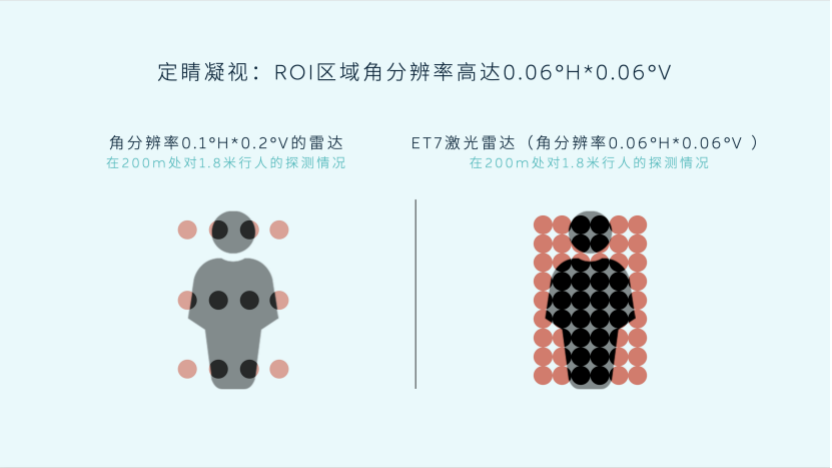
1550nm波长激光的光斑非常小,在100米外光斑直径仅为905的四分之一。在探测100米处的行人时,可以接收到横排4个点,纵排️7个点的脉冲,清晰地探测到行人的姿态。蔚来ET7激光雷达最远探测距离可达500米,10%反射率标准下的探测距离,可达250米。

如今自动辅助驾驶功能,包括领航辅助功能,更多被应用于高速公路及城市快速路等路段。随着车速的提高,远距离探测已成为确保自动辅助驾驶安全性的必要能力。更快的车速要求车辆具备更远的探测距离:当前方出现危险物体,车辆需要紧急刹停时,车速越高需要的刹停距离越长。因此更长的探测距离,有助于在高速行驶时,更早地发现险情,更早地采取制动,避免事故伤害。
01°的角分辨率变化,在200m处,相邻的两个点距离约在3.5cm。以0.1°角分辨率的激光雷达为例,其接收到的相邻两点间隔35cm,对于行人、自行车、摩托车这样的目标物体,点云过于稀疏,对于算法挑战极大。
所以要看得稳,POD是衡量激光雷达性能的重要指标。也就是探测概率,一般为超过连续100帧发射的激光束数量(即理论点数量)与被探测到的激光束数量(即有效点数量)的比值。POD体现出激光雷达接收返回点数的能力和稳定性,是反应激光雷达性能的一项重要指标。蔚来搭载的激光雷达可感知250m处10%反射率物体的探测概率超过90%。更高的POD可以让车辆更清晰明确地感知到目标物体,减轻算法压力,实现更远的有效感知距离,提升自动驾驶系统整体的安全性。



-

凤凰网汽车公众号
搜索:autoifeng

-

官方微博
@ 凤凰网汽车

-

报价小程序
搜索:风车价


.png)
大家都在看







趣图推荐
.png)