麻省:完全自动驾驶至少10年才能落地,马斯克:我今年就能达到L5
一个月前的世界人工智能大会,马斯克放出豪言“特斯拉将在今年年内实现L5级别自动驾驶的基本功能,L5级自动驾驶已经不存在根本性的挑战”。

而最近出自麻省理工的一份自动驾驶发展报告,却与马老板的结论大相径庭,麻省认为全自动驾驶系统将至少需要10年才能落地。
一个是年内就能达到L5的基本功能,一个是至少10年才能完全落地,两种结论为何差异如此之大?

麻省认为影响自动驾驶落地的关键依旧是成本问题,主要体现在自动驾驶车辆的硬件成本以及“人工监管”成本。
而马斯克在世界人工智能大会的访谈中却称,“完全自动驾驶实现不存在底层根本性挑战,面临的挑战是解决细节上的小问题以及整合系统解决长尾问题,可以树立大多数场景的情况,但是又会不时出现一些奇怪的情况,必须有一个系统来解决训练。而依靠特斯拉现有的硬件基础,只需要改进软件就能实现L5级别自动驾驶。”
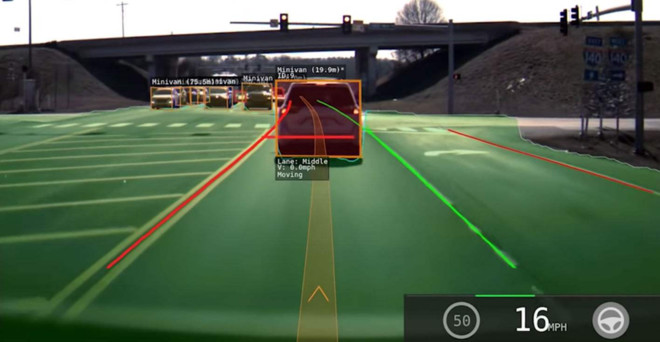
马斯克之所以这么说,原因在于特斯拉走的是一条过于依赖视觉神经网络的非主流路线。

所以马斯克提到了一个关键点,所谓的解决细节问题以及整合系统解决长尾问题实际上应该是指自动驾驶车辆视觉神经网络面对场景的细节优化问题,也就是关键在于自动驾驶车辆的神经网络能不能做到真正的拟真性?
就像马斯克前面说的,特斯拉现有的硬件基础可以支持,但需要改进软件来实现L5级别自动驾驶。
只不过单纯依靠软件来解决很难,现实场景是特斯拉进行神经网络训练的一种办法,每年几十万在“影子模式”下享受自动辅助驾驶功能特斯拉车主,理论上都为特斯拉自动驾驶道路测试提供了最为真实的视觉神经网络训练模型。

然而真实世界的变化却是无穷无尽的,单纯依靠现有真实环境来训练视觉神经网络永远得不到最优的解。所以马斯克还希望的是有一个更完整的神经网络训练系统来解决或者修补这个问题。
但这恐怕也不容易,因为现实道路的复杂性仅依靠数字化的神经网络模型拟合出来恐怕也是完全不可能的。
就像Waymo在自动驾驶仿真测试平台已经累计了超100亿英里路测数据,但离完全自动驾驶依旧遥遥无期。

而最近特斯拉AP更新到最新的一版,可以识别到交通信号灯,然而网络上却流传着一个尺寸小得多的红绿灯模型就可以骗过特斯拉得AP的事例。
而早前更新的特斯拉AP,很容易把前方的红色物体识别成雪糕筒,以至于中控屏上莫名出现红色障碍物的例子。
依靠V2X技术这些都是很容易解决的问题,但是依靠视觉神经网络进行主导的特斯拉AP,反而仿佛功能进阶的越多开放的越多,展现出来的细节小问题也就越多。
而对于马斯克来说,这些在场景处理上优化不好的细节问题也才是目前特斯拉AP面临的真正难点所在。
如果解决不了,那么只能说特斯拉很快实现L5级别自动驾驶的基本功能或许是可以的,但最终的情况其实是在无限接近于L5完全自动驾驶的路上,离真正的完全自动驾驶永远还差一点火候。
相对而言,麻省理工的观点就保守很多:全无人驾驶系统至少需要十年时间才能大面积商用,且自动驾驶扩张将出现在不同地区的特定交通类别中,会导致各地的自动驾驶可用性存在差异。
而且麻省理工的报告认为最有可能先出现的可能是自动驾驶卡车,因为这关乎很现实的物流成本考虑。
另外,麻省理工的结论中提出的“人工监管”也挺新颖,这可能是一个类似于现在自动驾驶测试车辆安全员的角色,不同的是这个“安全员”是线上的。
其实不管是麻省理工提出的十年期,还是马斯克声称的一年期,两种说法都没什么错。只不过马老板的想法更像是理工男思维,只要技术端实现了,那么应用端实现也就不远了。
而且特斯拉对自动驾驶的实现虽然完成度比较难,但路径相对单一更依赖于车辆本身,只要车辆实现自动驾驶了,也就意味自动驾驶这件事完成了,但事实并非如此。



-

凤凰网汽车公众号
搜索:autoifeng

-

官方微博
@ 凤凰网汽车

-

报价小程序
搜索:风车价


.png)
大家都在看







趣图推荐
.png)