激光雷达VS摄像头,自动驾驶该如何感知世界?
Google深耕,华为布局,双英“芯动”,苹果蓄势,百度亲力,特斯拉狂飙突进,新势力摩拳擦掌,传统车企不甘示弱...引无数厂商竞折腰的自动驾驶,俨然是2021最火赛道。
而这条火热赛道上,最精彩热闹的,要属激光雷达和摄像头的感知路线之争。
自动驾驶必将掀起一场技术和市场的革命,必将成为行业风口,世界各主要经济体都在着力发展,中国也不例外。
中国汽车工业协会就预测,中国将在2020至2025年间实现低速行驶和泊车场景下的自动驾驶,2025至2030年间实现更多复杂场景下的自动驾驶。
同时有预测称,2035年中国智能汽车产业规模将超过2000亿美元,中国将成为世界第一大智能汽车市场。

将关注点聚焦到自动驾驶技术层面,在刚刚过去的2020年,激光雷达是绕不过去的行业热点:一方面,激光雷达的成本一降再降,各个厂商的激光雷达量产车型相继推出;
另一方面,智能电动车标杆品牌特斯拉仍在坚持摄像头感知路线,马斯克早前也曾表示“用激光雷达的都很愚蠢”。
展望2021年,高级别自动驾驶的实现之路上,激光雷达与摄像头的分歧,依然是重头戏。今天,讲堂就来谈谈激光雷达与摄像头的感知路线之争。
★ 自动驾驶基本原理
要搞清自动驾驶为何会有激光雷达与摄像头的路线分歧,就要先弄清自动驾驶的基本原理。
自动驾驶是指车辆可以通过自身对周围环境条件感知、理解,并自行控制车辆行驶,高级别自动驾驶最终能达到人类驾驶员的水平,实现无人驾驶。
自动驾驶系统分为三个层级:感知层、决策层和执行层。
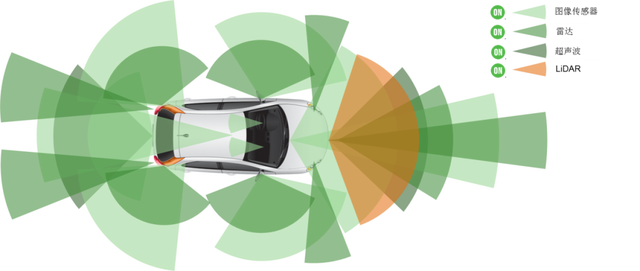
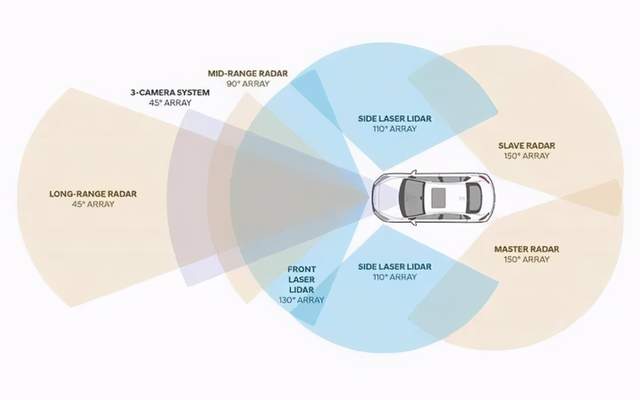
感知层的职能是收集周围的环境信息并做出预处理,主要包括环境感知和车辆定位。环境感知特指对环境的场景理解能力,如红绿灯、车道线、指示牌、障碍物、行人车辆等的检测和识别。定位则是自动驾驶系统基于环境感知得到的信息,定位出自身所处的环境位置。

决策层类似于人类的大脑,会基于感知层的信息,做出任务规划、行为决策和动作规划。执行层负责精准地执行决策层规划好的动作,如及时给出合适的油门、刹车、方向等信号指示,完成车辆的自动驾驶。
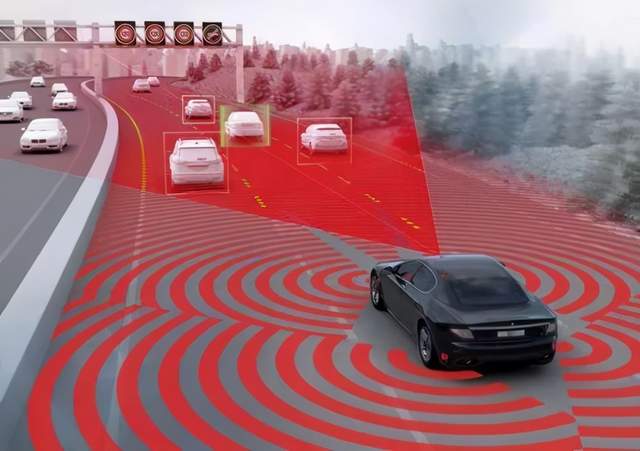
这其中,环境感知是实现自动驾驶的最重要一环,面临诸多挑战。目前的环境感知也存在两个技术路线分歧,其一就是摄像头+毫米波雷达的融合方案VS激光雷达+摄像头+毫米波雷达的融合方案。
★ 摄像头感知方案的瓶颈
2020年以来,无论传统车企还是造车新势力,都基本认定了激光雷达感知方案,只有特斯拉还在孤单影只地坚持摄像头方案。
摄像头方案最符合马斯克以第一性原理指导创新的理念,既然人可以靠双眼观察周围环境开车,那么自动驾驶系统也可靠摄像头做到同样的事。

但摄像头想要识别出2D画面信息,就必然依赖于算法逻辑,确切地讲就是人工智能中的图像识别,通过深度学习神经网络对场景进行像素分割、物体分类、模型标定和目标跟踪,实现对障碍物的识别和匹配。
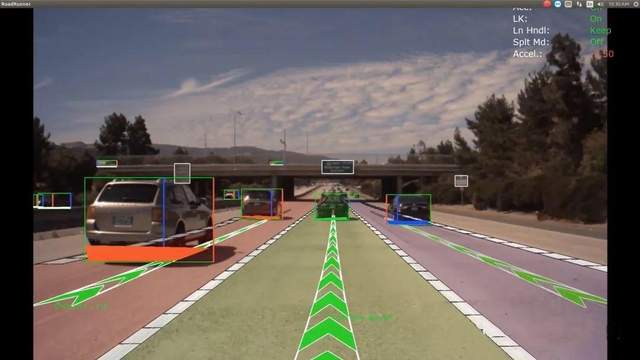
视觉感知的优势在于分辨率高,可识别周围环境的颜色、表面特征等信息,实际场景中的红绿灯、车道线、指示牌等都可清晰辨识。
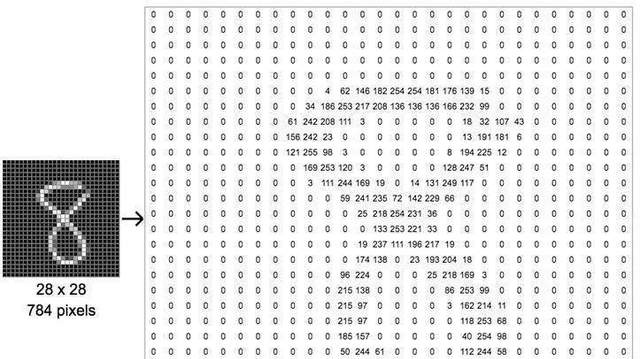
但是,深度学习的完善,离不开输入和输出端的大量数据。以MNIST手写数字识别简单为例。

对人来讲,识别图片上的数字非常容易,但对计算机而言,每张图片都是一个数字矩阵,计算机需要先将巨量的手写数字图像存储到数据库中,然后基于存储数据进行深度学习,最终识别出图片上的数字,甚至包括未录入数据库的相似模样数字。
自动驾驶的尴尬之处在于,其数据几乎完全来自常规环境,但车辆驾驶是充满偶然性的,比如行人或动物突然出现在行驶路线上,驾驶指示牌被部分遮挡,或者遇到暴雨和强逆光等极端场景。
没有相关场景下足够的数据积累和与之对应的深度学习,自动驾驶难免表现挣扎。即使数据积累笑傲行业、自研芯片和算法、实现软硬件闭环、有“影子模式”不断修正算法,特斯拉依然会有侧翻货车识别的噩梦。

恰恰是这些小概率的极端场景,成为自动驾驶最难攻克的山头。登顶之路,往往是最后5%的路程,需要95%的努力,抑或,另辟蹊径。
★ 激光雷达后来居上
激光雷达,LiDAR,英文全称Laser Detecting and Ranging,通过激光束进行探测和测距,由激光发射器、光学接收器、和信息处理系统三部分组成。
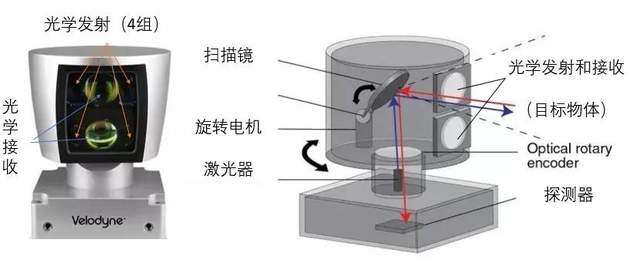
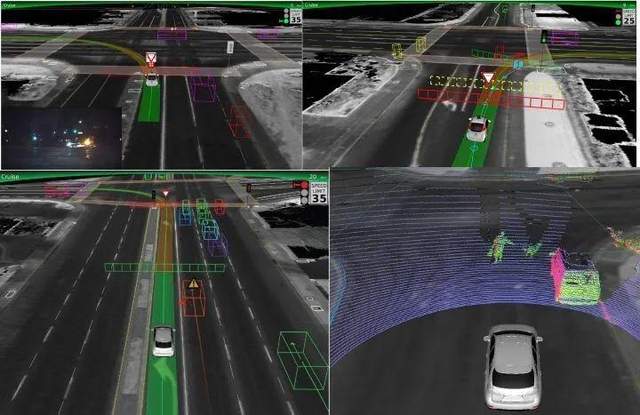
以美国Velodyne的64线激光雷达为例,该激光雷达每秒可向外界发射数百万个激光脉冲,并通过内部旋转装置对周围环境进行旋转扫描,每一次扫描都可获得巨量的空间信息(x,y,z)点,这些空间信息点的集合就被称为点云数据,由点云数据构成的三维图也就称为点云图。
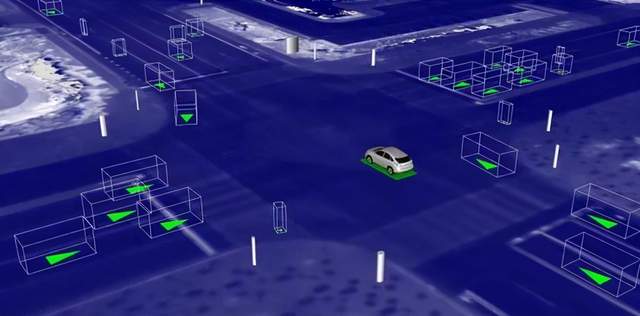
测距距离远,速度分辨率高,能创建出目标清晰的3D图像,这是激光雷达最大的优势。
虽然高度的可靠性和精确性,使激光雷达成为自动驾驶环境感知中最重要的传感器,但激光雷达有其劣势。在开阔地带,由于缺乏特征点,激光雷达会存在点云稀疏甚至缺失的问题;面对不规则的物体表面,激光雷达也不易分辨出其特征模式。
摄像头的高分辨率和激光雷达的精准测距,恰好互为补充。相比于依靠摄像头的纯视觉感知,激光雷达与摄像头融合,带来信息获取能力的提升,算法要求得以降低,行驶安全也多了一份保障。

成本、体积、车规级,一直是压在激光雷达身上的三座大山,其中,尤以成本问题最核心。
要知道,最早Google无人车上顶着的那块激光雷达,成本就达到7.5万美元,虽然Waymo后来将其激光雷达的成本降至7500美元,但依然是对量产车不友好的价格。

近年来,随着技术路线的革新和成熟,光电半导体成本的下降,激光雷达的价格不断被屠,量产友好的激光车雷达不断涌现。
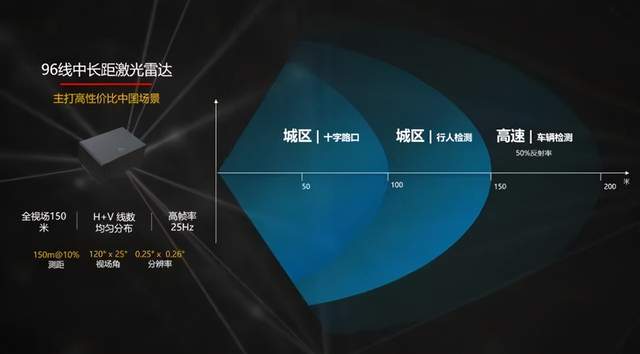
华为在2020岁末,发布了96线雷达,号称把激光雷达价格压缩到200美元;Luminar即将量产的300线1550nm波长激光雷达,据说软硬件打包价格不超过1000美元。
而激光雷达这条军备竞赛的路上,还有Velodyne、Quanergy、博世、大陆、法雷奥、禾赛科技、速腾聚创、大疆等生产商,其中法雷奥是唯一一个实现车规级量产的。
成本甫一亲民,激光雷达量产车型就雨后春笋般涌出。WEY品牌的旗舰车型摩卡,将会搭载全固态激光雷达;蔚来发布的旗舰轿车ET7,搭载了图达通的1550nm激光雷达;小鹏汽车也宣布与大疆孵化的Livox览沃科技达成合作,在2021年推出的新车上使用定制版的车规级激光雷达。
★ 激光雷达和摄像头的下半场
摄像头方案以成本优势,在早些年得到厂商的偏爱,得以推广,常规场景的感知技术也相对成熟。但以一种开放的心态看,激光雷达作为一种视觉感知的有效技术补充,不应被排斥,如果技术成熟,如果成本可控。
技术日趋成熟,自动驾驶激光雷达的最优方案也会逐渐明晰:机械式、混合固态和纯固态哪个更好;MEMS、相控阵以及微透镜阵列哪个更优;905nm波长规格率先落地,还是对人眼健康更友好的1550nm波长最终商业化;图像级识别精度的300线何时大规模量产。
成本可控也至关重要。全球科技创新产业专家王煜全对激光雷达产业就有一针见血的评价:“激光雷达即将进入成熟期,比拼的就是成本优势、规模优势。”成本优势带来规模优势,规模效应会近一步促进技术成熟,技术成熟推动成本降低,产业得以良性循环。
产业在走向成熟,优胜劣汰也在加速,激光雷达这个战场,愈加激烈。至于马斯克的嘴硬,也许是因为激光雷达方案不符合和其第一性原理的创新理念,也许是激光雷达的高昂成本与特斯拉降本走量的发展战略相冲突。
但是,当规模化应用把激光雷达炸成白菜价后,特斯拉会继续无视激光雷达对自动驾驶的提升么?会放任其自动驾驶核心竞争力被友商肆意追赶么?马斯克是会坚持既定模式,还是真香呢?
本文作者为踢车帮 逝水



-

凤凰网汽车公众号
搜索:autoifeng

-

官方微博
@ 凤凰网汽车

-

报价小程序
搜索:风车价


.png)
大家都在看







趣图推荐
.png)