索尼VISION-S不谈电池、续航,“肌肉”全在传感器上?

如果你对索尼足够了解,肯定知道它在游戏、电影等行业都有涉足;如果你对最近几年索尼的发展有所了解,也应该知道它开始惦记汽车领域的事儿。
早在2020年的CES上,索尼发布过一台VISION-S 01的纯电概念车,2022年发布了VISION-S 02。电气化时代的来临,看似把造车门槛降低了,原有的发动机、变速箱不再是纯电车型的必要条件,门槛低就低在了这里,取而代之的是高续航的电池、感知设备和算力来展示产品的“肌肉”。
两届CES、两台概念车,但我们依然对索尼造车的具体数据知之甚少。但通过两台车发布的信息来看,我们似乎也已经看清索尼造车的核心亮点。
VISION-S 02身上,我们该关注什么?
索尼VISION-S 02与VISION-S 01一样,没公布电池信息、量产信息,核心的内容放在了40个传感器和索尼自己研发的CMOS感光元件上。可以肯定的,电池不是VISION-S系列的核心亮点;留一个疑问,VISION-S系列真的会量产么,或者是索尼可能想做Tier 1?
先来了解VISION-S 02的信息:
索尼VISION-S 02车型定位有别于VISION-S 01,是一款7座SUV,整车电动化平台依旧由麦格纳提供;
VISION-S 02依旧是全轮驱动,每个车轮配备268马力电机;
VISION-S 02与VISION-S 01一样,没有公布电池容量以及续航里程信息;
与VISION-S 01上的33个传感器有所区别,VISION-S 02的传感器增加到了40个;
VISION-S 02具有车载5G能力,应该是冗余设计,为了以后的V2X互联。

VISION-S 01、02两款车型除了用了索尼自家的摄像头、雷达等产品,供应商还有博世、黑莓、高通、英伟达、大陆等品牌,高精地图供应商是HERE,软件供应商是Elektrobit。这些供应商从车载操作系统、芯片再到高精地图已经把整车大部分核心零部件覆盖,剩下可见的亮点就剩下索尼的摄像头、雷达和ToF镜头产品。
说白了,我们对于索尼造车的关注点应该放在它自研的这些产品中代号为“IMX459”的产品。
代号IMX459,索尼用在车上的黑科技

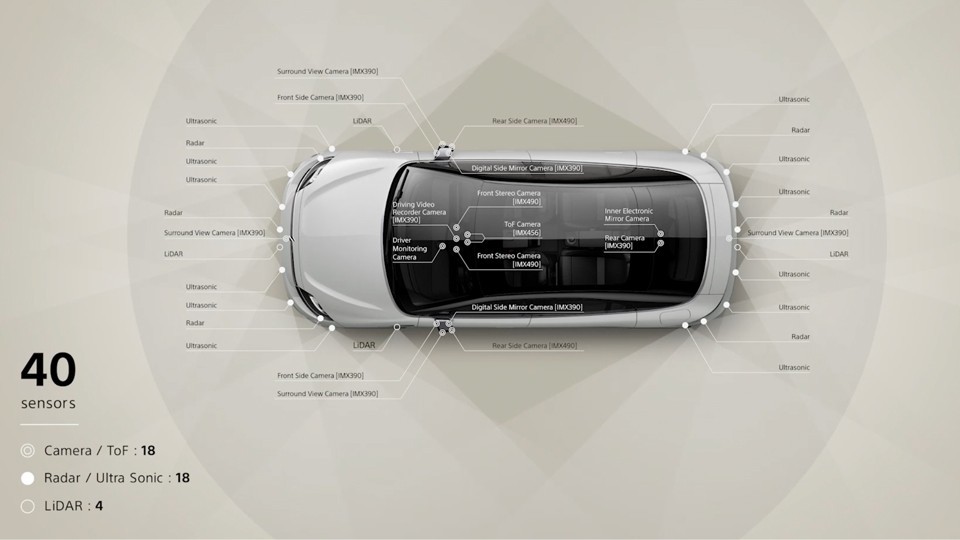
今年发布的索尼VISION-S 02全车用了40个不同的传感器,包括高清摄像头、毫米波雷达、超声波雷达以及激光雷达等不同的感知设备。其中激光雷达有4个,摄像头有18个,而且以上都是采用索尼自研的车载级设备,还有CMOS感光元件。
在索尼官网的示意图里,表示了大部分摄像头的型号,例如IMX390、IMX456和IMX490等,但激光雷达标识依旧只是简单的以“LiDAR”这样的形式来标注搭载具体位置。在激光雷达之后,我们应该关注的是IMX459的SPAD激光雷达传感器。
最近几年,激光雷达行业的技术革新非常快,包括双棱镜、OPA、Flash、FMCW多种技术路线不断加入行业之中,但本质上其实没有进行升级。但索尼的IMX459在最底层的激光接收和信号处理层,做出了改变:
采用对光感知更敏感的SPAD(单光子雪崩二极管)技术,可以检测到非常低的信号强度;
传感器像素数量达到了11万级,优于普遍市面上的传感器像素;
传感器微型化,尺寸约为10平方毫米。
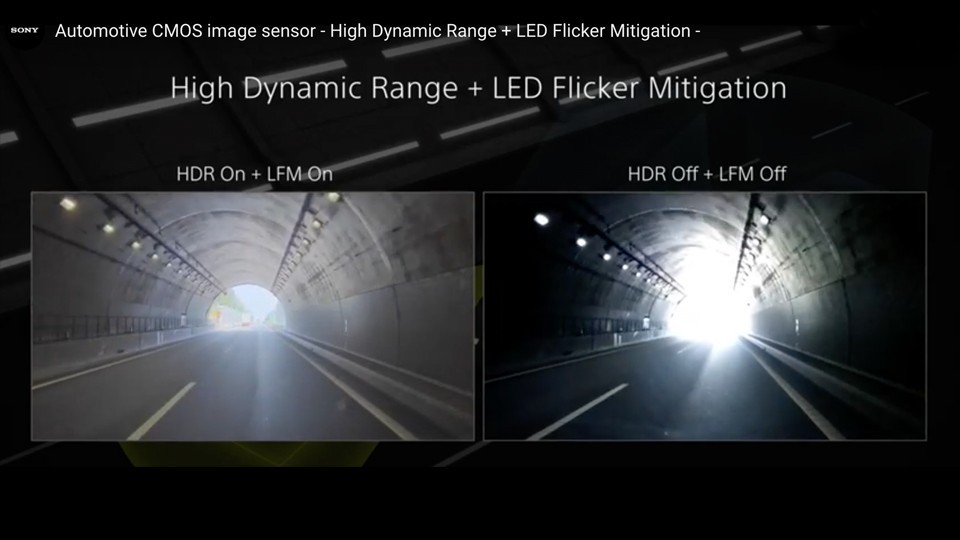
虽然现行大部分激光雷达的感光方案也能做到清晰、精准,但如果进光量不足或者干扰光线也进入其中,那么激光雷达传感器的成像中就会出现噪点。对于“噪点”需要通过额外的AI芯片去处理,所以存在噪点的激光雷达最终的成像会有一定的延时产生,噪点虽然没了但延时有了。
相比于传统激光类的传感器,索尼的IMX459传感器有两个优势,第一个是感光能力更强,相当于使用相同的激光发射器的情况下,SPAD能感知到更弱的光,而且感知距离也更远。最大测量距离300米,能以15厘米作为一个单位范围进行测量。第二个是计算距离的延迟更低,只用6纳秒,用到的技术是光子飞行时间(ToF)、被动淬灭。

理解SPAD的感光逻辑,相机就是最好的例子。现在的数码相机的CMOS的像素呈现需要通过接受大量光子,感知到光线强度再控制光子进入的数量才能形成最终正确的曝光成像。应用到激光雷达上也一样,每个像素点都需要进入特定的波长和大量光子,最终形成激光雷达图像,距离的感知通过另一颗计算芯片来测距。
噪点能通过AI芯片做预处理,但实际根本的问题没有得到解决。但SPAD在接受的光子数量极少的情况下仍然能完成成像,也就意味着SPAD传感器具有非常高的信噪比。信噪比越高也就说明激光雷达最终成像更清晰、质量更高,从而提升的是车辆辅助驾驶上的安全性。
无论是SPAD还是ToF都是技术难点,那为什么又要把SPAD引入到ToF中?因为ToF需要检测出纳秒级的光信号,所以对光的要求非常高,所以在接收端索尼的激光雷达选择了SPAD(单光子雪崩二极管)来解决用光需求。此外,ToF 本身电路设计复杂,会占据更大的尺寸,SPAD作为ToF的关键技术,目前页只有意法半导体、索尼和英飞凌等公司在做。
传感器堆叠,解决响应速度
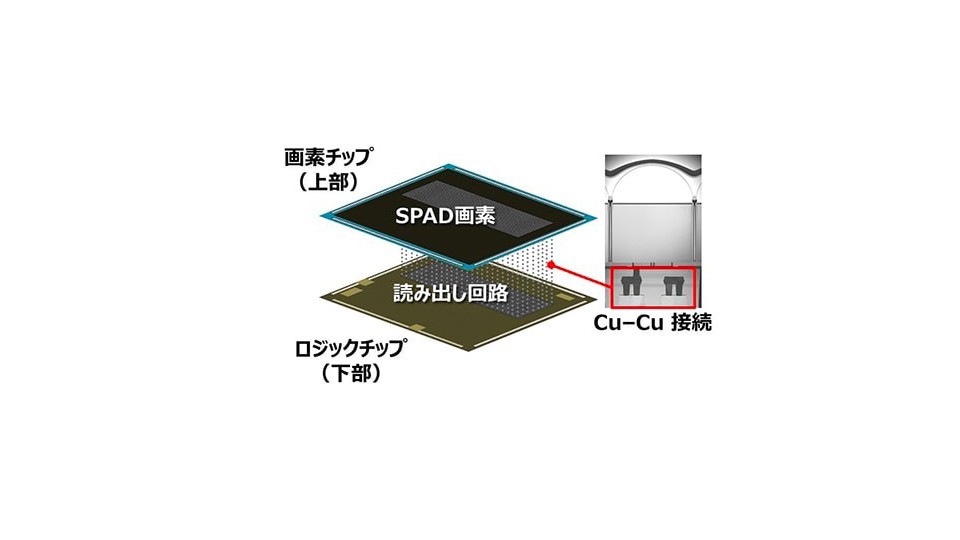
所谓的传感器堆叠,其实是索尼打磨很久的“双层图像传感器堆叠”技术,除了能缩小体积之外,这项技术还能让感知响应速度变得更快。而这项技术,也是索尼之前利用在CMOS图像传感器开发中的技术,例如背照式像素结构、堆叠结构和Cu-Cu连接。
这样,就能成功构建一种将SPAD像素和测距处理电路封装在单个芯片的元器件架构。
关于这个传感器堆叠的技术路线,索尼做过一次较为详细的介绍。底层是逻辑电路,每个像素尺寸为10x10毫米,传感器表面也并非完全平整,每个像素点被做成一个凸透镜,这样就能实现更高的光折射率,从而提升激光的接受效果。
根据索尼官方的测试数据来看,激光雷达传感器数据在905nm波长的光源条件下,检测效率能达到24%。而且由于每个SPAD像素都能和底层的逻辑电路链接,所以从感知到光子到转换成数字信号,整个过程只需要6纳秒,再匹配索尼开发的数字时间转换器省略了二次计算的时间。
索尼IMX459使用的ToF测距方式,能让SPAD捕捉到精确的时差、精确的深度分辨率,精确程度甚至能达到毫米级别。但唯一的弊端,就是ToF的测距方式感知距离短,在移动设备上只有5米左右的测距能力。5米的测距能力放到汽车上实现自动驾驶,确实不够用。
由于堆叠架构提升了效率,让SPAD技术得以弥补ToF的劣势,SPAD具有微弱光线也能成像的优势,而且依托于堆叠架构能有更好的传输速度,最慢的响应时间为7纳秒。以上的技术难点就在于传感器的堆叠架构,但好在索尼有之前做堆叠式CMOS的处理经验;另外,松下也正在研发堆叠式SPAD的ToF图像传感器。
总结
索尼的IMX459在今年3月份才能推出样品,这项技术对于高级驾驶辅助系统(ADAS)的普及和自动驾驶(AD)的实现会有很大帮助。道路状况以及车辆和行人等物体的位置、形状会变得越来越复杂,所以目前除了摄像头和毫米波雷达等传感设备之外,我们更需要能高精度检测、识别、追踪的激光雷达。
结合索尼在两次CES上都没有对旗下汽车产品的续航、电池、芯片算力做出过多的解读,把我们所关注的重点推向了IMX459这种传感器技术,背后的逻辑就是应用SPAD+ToF技术并配以双层堆叠架构解决响应时间的问题。



-

凤凰网汽车公众号
搜索:autoifeng

-

官方微博
@ 凤凰网汽车

-

报价小程序
搜索:风车价


.png)
大家都在看







趣图推荐
.png)