智行者张放:打造数据驱动的全场景行泊越一体智能驾驶方案丨GADS 2023

作者 | 迩言
编辑 | 志豪
2023年12月19日,2023全球自动驾驶峰会(GADS 2023)在深圳圆满举行。
在开幕式上,智行者科技联合创始人、研发中心总经理张放博士登台演讲,主题为《数据驱动的全场景行泊越一体智能驾驶方案》。他从智能驾驶行业现状、全场景智能驾驶方案和量产应用等视角带来分享。
他表示,智能化程度、高阶智能驾驶已成为新能源车主购买决策的的重要因素,高阶智能驾驶正在快速上车。
但是城市NOA在推进过程中也面临用户体验不足、城市覆盖度有限、性价比不足等难题。为此,智行者打造数据驱动和全场景的解决方案,提升用户在城市结构化道路和非结构化道路、甚至在越野场景的驾驶体验。
在系统层面,智行者打造了3个技术IP,分别是AVOS自动驾驶的软件平台、AVCU自动驾驶中央计算单元和AVDC数据闭环平台。基于这些底层技术,智行者的智能领航、智能泊车、智能越野等系统已经量产应用到多款车型中。
以下为张放的演讲实录:
一、智能驾驶成重要购车因素 NOA系统正在快速上车
大家好!很高兴有机会和大家分享智行者在这个行业的看法以及当前的技术进展。
我们都知道,“行泊一体”是大家很熟知的概念,除了城区和高速场景,越野场景下也有非常强烈的需求,所以我们也把越野场景加到了我们的方案之中。
北京智行者成立于2015年,聚焦于自动驾驶大脑的开发,定位为智能驾驶整体解决方案供应商。智行者现在打造了以软件、硬件和数据为核心的解决方案,目前我们的产品落地在智慧出行、智慧生活、智慧安防等不同领域,也是国内首批实现自动驾驶商业化落地的公司之一。
这两个图介绍了新能源车主和造车新势力车主在购买车辆时最主要关注的因素。
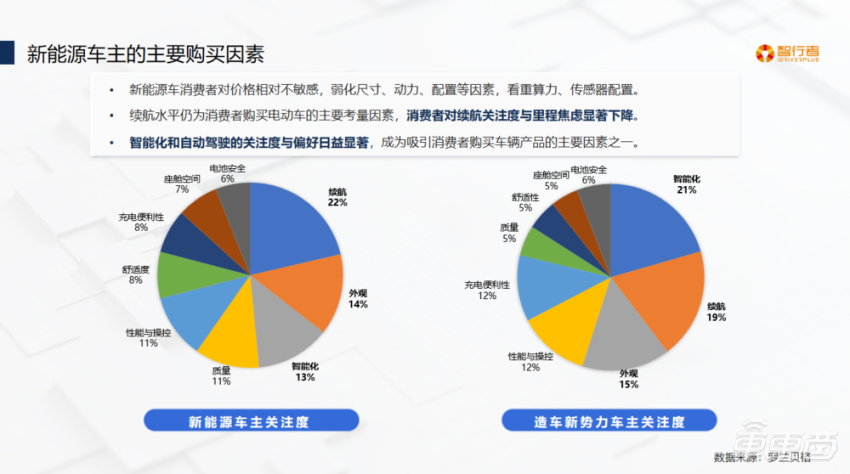
▲新能源车主的主要购车因素
可以看到有几个特点,首先是对于新能源车主来说,续航还是大家购买车辆时非常重要的选择因素之一。
但是目前来说,大家的里程焦虑越来越少。一方面得益于城市道路基础设施包括充电基础设施越来越完善,另一方面电池技术也在不断更新,前两天蔚来举办了号称续航最长的直播,全程驾驶1000余公里,可以看出整个电池续航越来越高。
另一方面,智能化、自动驾驶也成为吸引消费者购买汽车非常重要的影响因素。
具体来看,L0到L2的智能化驾驶产品的搭载量,首次突破1000万大关。而L2包括L2+的系统搭载量已经接近30%,这是非常高的比例。
另外NOA系统的增长也比较快,大概在2023年1~6月份也有相关数据统计,每10辆车就有1辆车前装标配L2+高阶自动驾驶辅助系统。
特别对于城市NOA来说,大家把2023年叫做城市NOA的元年,2023年比较有名的造车新势力或新能源车企都在城市NOA落地方面设定了非常激进的计划,像小鹏在2023年Q1推送5城,在2023年年底会推送50城,2024年会推送到200城。对于华为来说,在2023年Q2开放5个城市,之前公布在2023年底开放全国所有的城市,并且是无图的方案,还有像蔚来、理想等车企都公布了自己在城市NOA的进展和规划。

▲市场现状
2023年11月,四部委联合发布L3和L4自动驾驶准入通知,这是一个试点工作的通知。通知对于高阶自动驾驶的准入、路上的测试规范和对使用主体的要求都有具体的规定。目前有几个企业公布了上路测试的信息,开始在局部地区进行L3和L4级别的测试。
二、城市NOA难题:用户体验、场景覆盖、性价比
城市NOA是大家非常关注的方向,但是在实际落地过程中还是有很多问题亟待解决,有很多尚待完善的地方需要大家共同攻克,可以体现在以下几个方面:
首先是用户体验,在高阶智能驾驶特别是城市NOA方面,当前带来的用户体验和成熟的老司机相比,有一定的差距,特别在场景稍微复杂的时候,比如人、车、自行车混行的场景下,体验还是有待提高。
第二是使用场景受限,目前,很多二线城市、乡村都不在智驾系统使用场景范围内,客户买了这个系统只能在典型区域内使用,大大影响使用这个系统的体验。
第三是当前的城市NOA系统性价比相对较低,标配的激光雷达、高清摄像头、大算力域控制器,大概是2~4万元。如果是20万~30万的车型,智驾系统的成本占比还是比较高的。这个高成本的投入,如果客户体验不到城市续航所带来的更好的驾驶体验,对于城市续航系统的推广也很不利。
三、3大IP 打造数据驱动和全场景的解决方案
因此,我们也提出了应对措施。第一,限制ODD内,使用纯视觉的方案降低系统的成本,追求极致性价比。第二,现有的成本下拓展ODD,从高速到城市、越野场景,甚至在乡村道路也可以开。第三是提升自动驾驶等级,像典型场景下的L3自动驾驶系统。
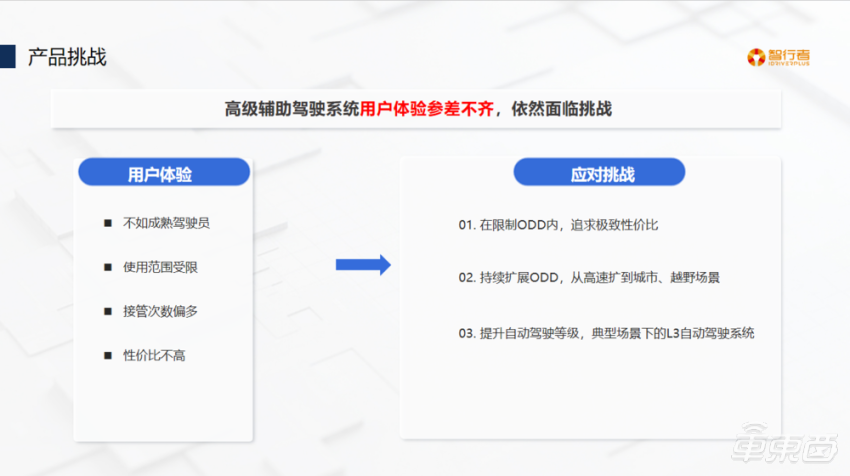
▲产品挑战
为此,智行者打造数据驱动和全场景解决方案,除城市结构化道路和非结构化道路外,我们希望在越野场景提供给客户更好地体验。
这些解决方案在系统层面有三个主要部分,第一个部分是AVOS自动驾驶的软件平台,第二个是AVCU自动驾驶中央计算单元,第三个是AVDC数据闭环平台。

▲智能驾驶大脑的“铁人三项”
AVOS系统架构可以共享在不同功能系统之间的能力。
比如说前段时间两家自动驾驶头部企业就AEB产生的争论。其中很大一部分原因是,在开发AEB的时候能不能把在高阶系统上开发的能力降维应用到AEB系统,我们在高阶自动驾驶系统上开发的激光感知能力,或针对高阶系统的行为预测能力,能不能快速复制应用到AEB这一相对传统的系统。有这样的支撑架构,就可以快速将高阶系统能力释放到低阶的系统。
BEV感知,大家也比较熟悉了,我们在BEV的基础上单独为远距离的目标识别和检测增加了神经网络模型,提升在高速场景下的远距离识别能力。
除了算法以外,如何做好工程部署和系统优化也至关重要,我们针对芯片做了大量的底层软件优化工作,包括多任务网络的设计提升GPU的运行效率,节省CPU的资源。对于一个控制器或者芯片来说,有很多类型的计算单元,如何将设计的任务和网络比较好的分配到不同的资源上,提升整个系统效率,节省推理时间,这也是非常重要的方面。
目前比较流行的无地图或者轻地图的方案,不是说完全不需要高精地图。
这里介绍了我们在线端到端的构建方式,输入除了较为常见的静态道路感知以及导航地图之外,还加入动态的障碍物感知信息。
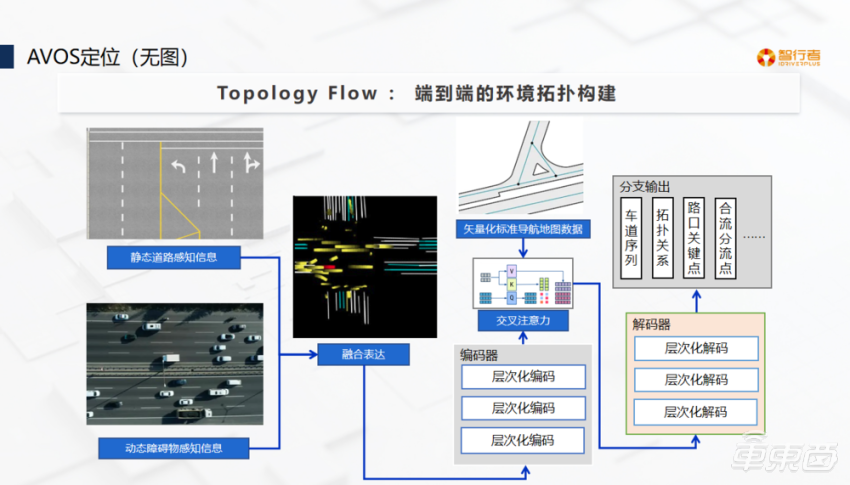
▲端到端的环境拓扑构建
在云端数据方案主要包括数据的采集、标注、清洗、预训练。目前大部分自动驾驶企业或多或少都已经建立起相对完整的数据闭环体系。
我们在数据闭环开发的过程中,主要关注两个方面,首先是数据的效率,其次是数据成本。
现在数据的效率问题在量产过程中是非常重要的问题,比如说一个整车的开发周期大概是18~24个月。其中对自动驾驶的公司来说,在SOP之前利用数据的时间大概是12个月,如何完成对于整个新车的数据采集和适配是非常重要的部分。
数据的成本,对于一个新车来说也很重要。每个车型的硬件方案都不一样,我们要为每个车型型打造属于自己专有的数据,提升模型在这个车型上的表现。
这是我们在效率和成本上所做的工作,基于多模态模型的以文搜图,好处之一是可以快速应用到已有的数据。

▲以文搜图
如果产生一个新的问题,通常情况下,从采集数据、标注数据,再进行模型训练,整个周期在1~2个月。更优的方式是基于现有的大规模路测数据,利用以文搜图的方式去在现有数据库中搜索到期望数据,以提升问题解决的效率。
除此之外,还有基于“大模型”的自动标注,包括对动态障碍物和静态障碍物的标注,如果采用完全手工的方案,成本很高。我们还和合作伙伴共同研究基于生成式AI的数据泛化。
这是大模型在自动驾驶的潜在能力。此外还有数据生成能力,特别是生成Corner Case等数据,比如说我们需要一个工程车辆,这个工程车辆在夜间,而且在桥下,不同要素的Corner Case维度结合在一起,整个成本就很很高,数据生成在这一方面就起到很重要的作用。
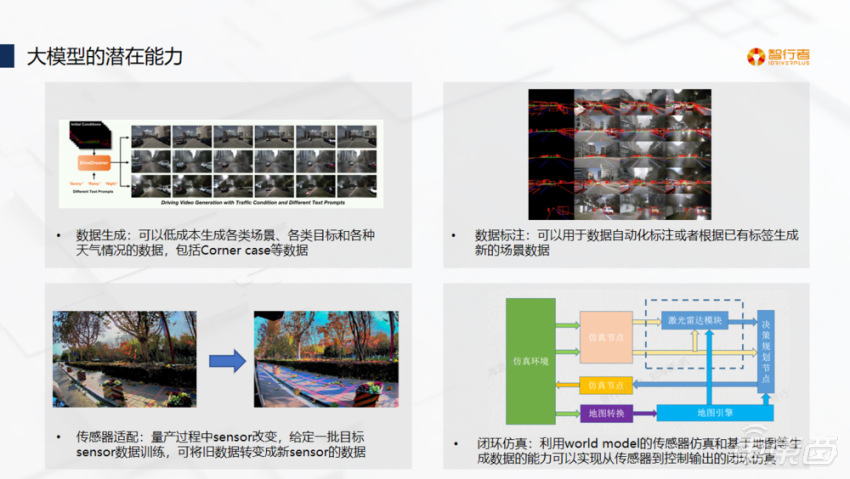
▲大模型的潜在能力
大模型的潜在能力还包括端到端的闭环仿真,仿真在自动驾驶发展了很长时间,目前应用大部分场景是低阶智能驾驶或者针对决策规划的仿真,对于高阶智能驾驶全栈闭环方式的产品比较少。
我们在感知层面并不能很好模拟摄像头的性能,对于机器来说,那些与真实数据有明显差异的仿真数据对于上实车的模型训练是非常不利的,有了大模型之后,就可以实现端到端,从感知到决策的闭环仿真。
在量产上,我们目前和国内主流厂商在合作,共同开发涵盖城市、高速、泊车以及越野等不同场景的智能驾驶系统。
我今天的分享就到这里,谢谢大家。



-

凤凰网汽车公众号
搜索:autoifeng

-

官方微博
@ 凤凰网汽车

-

报价小程序
搜索:风车价


.png)
大家都在看







趣图推荐
.png)