Waymo自动驾驶汽车被撞,是时候谈谈该如何保护自己了
原标题:Waymo自动驾驶汽车被撞,是时候谈谈该如何保护自己了
本文是雅斯顿原创文章
撰文 ✎ Volador
美国亚利桑那州在当地时间5月4号,发生了一起Waymo自动驾驶撞车事故。十字路口附近,一辆向东行驶的本田轿车,为了躲避撞上一辆向北行驶的汽车,情急之下拐向西行车道,与正处在低速自动驾驶模式下的Waymo 自动驾驶汽车发生碰撞。
至于这辆 Waymo 自动驾驶汽车在进行何种测试还不得而知,因为Waymo 曾表示将在亚利桑那州测试没有安全员的车辆,但这辆车配备了安全员。

从事故现场看,本田轿车车头发生了严重损毁,Waymo自动驾驶汽车左侧受到明显撞伤,左前轮有变形(该车由克莱斯勒 Pacifica 七座车改装)。由于本田车车速过快,导致两车人员均受到了不同程度的伤害(Waymo安全员受轻伤,本田车主伤势要重些)。具体事故原因还在调查中。
Waymo也不完美
就在不久前,针对Uber撞死人事故,Waymo首席执行官约翰·克拉富西克表示——“基于我们对目前为止所看到的情况的了解,在这种情况下,我们对自己的技术很有信心,能够安全地处理类似情况。”不过很显然他们指的是特定环境下的安全,像这种受迫性危险,缺少了人的机动性,它们还只是一辆正常水准的普通汽车而已。
事实上这已经不是第一次出现这类问题了。据已公布的统计称,Google 的自动驾驶测试车辆分别在 2015 年 7 月 1 日、2016 年 2 月 14 日以及 2016 年 9 月 23 日,在其总部附近发生过碰撞事故,同样也有人员受伤。

当然了,出现这个问题的并不是Google一家,比如去年3月,同样是亚利桑那州,Uber的自动驾驶汽车与一辆对向行驶、未遵守交通指示灯行驶的汽车发生碰撞,导致驾驶车辆侧翻。
虽然我们明白自动驾驶汽车离进入百姓家的日子还远,但既然是前瞻性技术,带着前瞻眼光讨论下如何解决“受迫性危险”这个问题,也挺有意义的。

注:其实“受迫性危险”这个词是我自编的,但意思其实挺形象。我们知道非受迫性失误指的是非常主动的情况下,发生的不必要失分。“受迫性”意思正相反,可理解为被动的,很难避免的。
“受破性危险”该如何避免
其实就避免这类问题,厂家们已经在想办法了,比如我们经常听到的主动安全技术就是用来干这件事的。
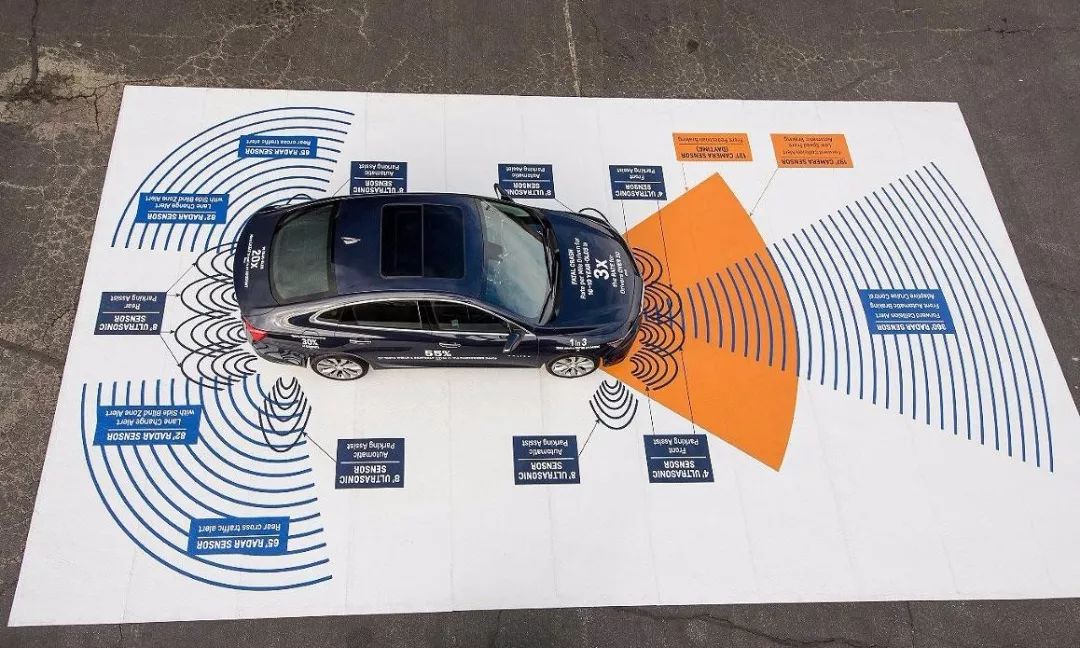
以AEB(自动制动系统)为例,主要由3大模块构成,包括控制模块(ECU),测距模块和制动模块。其中测距模块的核心包括雷达(以毫米波雷达为主)、人脸识别技术和视频系统等,它可以提供前方道路安全、准确、实时的图像和路况信息。
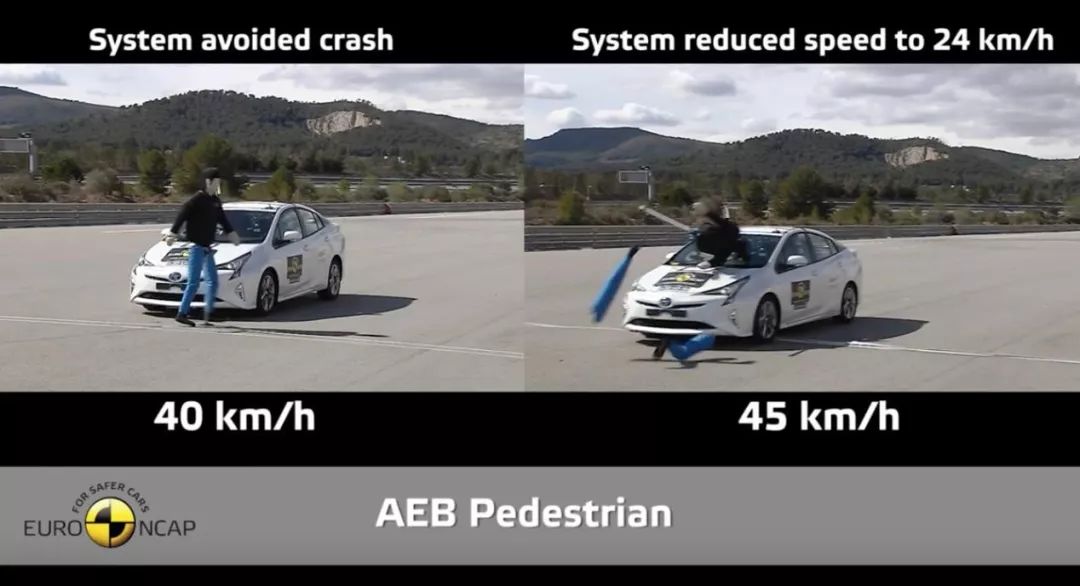
像Euro-NCAP这样的权威机构也已经把AEB列为重要的考核项目。据他们调研陈,装配之后能减少近27%的交通事故。
和AEB相似的例子我们就不一一举例了,像AWS(辅助驾驶预警系统)、TCS(牵引力控制系统)、ESP(电子稳定装置)、VSA(车辆稳定性控制系统)、ABS(防抱死系统)、EBD(电子制动力分配)、LCA(变道辅助系统)、ASR(驱动防滑系统)、SAS(座椅震动预警)等功能都在特定情境下发挥重要作用。
但如果大家有关注过这些安全技术,我们会发现一些共性。比如他们大多数不具备强大机动应变能力,而且倾向与刹车功能挂钩。换句话说,这些功能整体思路是预防为主,实在解决不了,那就尽可能的稳定汽车。
这么做当然没错,因为现今汽车配备的主动安全技术是用来服务驾驶员的,也就是说只要驾驶员够机敏,这个问题还是能解决。所以说到底,还是自动驾驶运算还不够快,控制不够迅速,不能做到眼见手到的条件反射。运动神经不发达,这是自动驾驶汽车现在很薄弱的一点。
如何提高运动神经
提高运动神经无非两种方法:
1. 疯狂的锻炼,以至于行成肌肉记忆。这对应到汽车上就是不断地增加续航里程,丰富驾驶危机处理方法,逐渐减小类似问题的处理时间。

另外锻炼也会增强肌肉的强度和韧性,而对应到汽车上就是我们能不断简化反应链的长度,提高各个环节的稳定性和强度,保证不会再某个环节掉链子。
2. 使用更聪明的系统。虽然笨鸟先飞勤能补拙,但天生的机敏却更为难得,至少不是谁都能当赛车手的。比如看到商机的苹果,早在去年年中就成功申请了一套自动驾驶汽车防撞系统专利,能够在事先不知道环境内物体的情况下成功导航脱离危险。有点像人驾驶汽车的思维。
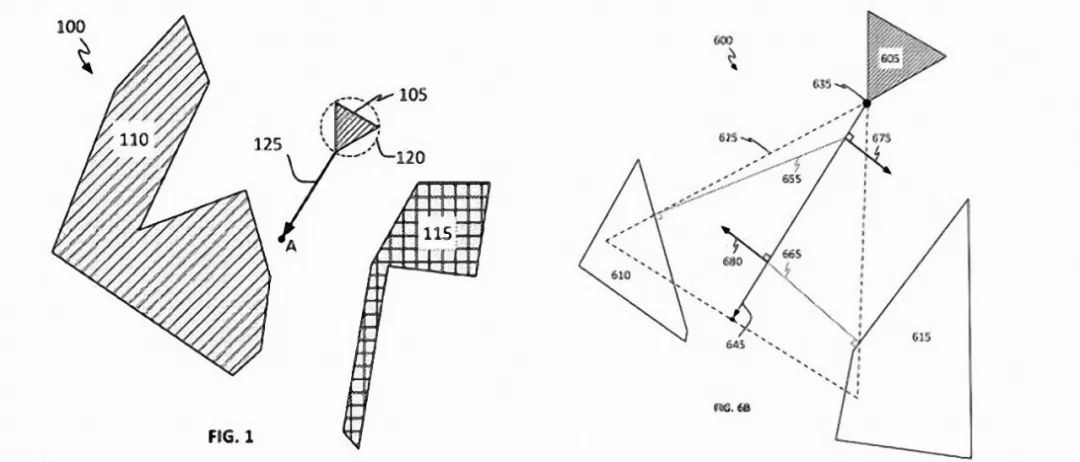
附:据称,苹果这项专利是在2015年年中申请的。其一大特色是模拟了各种形状的遮挡物。
专利显示,该系统能够以每秒60次的速度检查周围环境,从而侦测到多个迎面而来的障碍物,甚至与每个障碍物边缘的距离。潜在碰撞将通过比较障碍物边缘距离与已知包围半径来确定。
如果障碍物边缘被确定位于系统包围半径之外,那么汽车就会获准继续按照原定路线行驶。如果系统预测到可能会发生碰撞,它就会选择与当前位置最接近的边向量,并计算避让障碍物所需要的力。这一计算会考虑到汽车的质量、加速以及其他重要指标。

另外,这套系统还增加了学习能力。在避让第一个物体后,系统就会接着判断下一个障碍物,并吸收从前一次避让障碍物中学习到的数据。
雅斯顿小结
看来自动驾驶汽车的问题还有很多,虽然不少厂家已经能够实现封闭道路的自动驾驶,但离真正上路还有一段艰难的路要走。毕竟路边突然蹿出个什么,大家都已经见怪不怪了。
不过大家也不要过于悲观,一方面基于传统汽车的主动安全技术在量产车上已经有了巨大进步,大家已经有目共睹;另一方面一些先锋企业已经开始考虑这个问题,虽然效果不明显或未成形,但科技的进步远比我们想象中快。
图 | 来源于网络

About Astoncar
爱车,更多一点
雅斯顿 | 以消费者的目光探讨汽车,分享更多原创真实的汽车观点
Contact us
gao@astoncar.com
雅斯顿原创分享文章,版权授权请邮件联系我们吧:)



-

凤凰网汽车公众号
搜索:autoifeng

-

官方微博
@ 凤凰网汽车

-

报价小程序
搜索:风车价


.png)
大家都在看







趣图推荐
.png)