智能汽车量产的关键在哪?华为滴滴等公司大咖分享实战经验
周六,智能汽车领域的盛会——第三届全球智能汽车前沿峰会(GIV2020)在广州召开。车东西作为特别报道媒体,受邀参与本次大会报道。
大会举行的当天下午,地平线副总裁、智能驾驶产品线总经理张玉峰,滴滴出行人工智能实验室智能控制首席科学家唐剑,小马智行(广州)总经理莫璐怡,华为智能汽车解决方案BU MDC营销总监汪意革等业界嘉宾共同出席了“智能汽车技术突破与产品创新”主题峰会,围绕智能汽车产业化发表演讲,干货十足。
在张玉峰看来,传统摩尔定律已无法支撑AI对于算力的要求,需要针对AI芯片的“新”摩尔定律。唐剑表示,滴滴认为“融合”是实现和驱动汽车智能化的一个关键,他也在演讲中对滴滴在汽车智能化方面所做的工作进行了分享。
汪意革分享了华为在如何推动智能驾驶产业发展这一问题上思考。如何让智能驾驶产业实现最终量产?针对该问题,华为的答案是实现平台化,并坚持开放性。
一、地平线:计算平台是实现自动驾驶规模量产的关键
作为第一个演讲嘉宾,地平线副总裁、智能驾驶产品线总经理张玉峰分享了关于国产AI芯片如何加速赋能自动驾驶的一些思考。
在智能驾驶和自动驾驶领域,中国市场扮演的角色日益重要。智能驾驶方面,中国有望成为全球第一的ADAS市场;自动驾驶方面,地平线预计中国将会在2030年成为全球最大的自动驾驶市场。
智能驾驶与自动驾驶背后,计算本身、计算平台及软硬件开发所占的权重很高,同时对于能力的要求也是最高的。
在这一方面张玉峰表示,从行业发展趋势看,自动驾驶的成本正从硬件占比达到90%,向软硬件基本五五分成的方向发展。特斯拉的FSD(Full Self Driving)、Autopilot3.0系统的高额售价即是一个证明。
计算平台是实现自动驾驶规模量产的关键,只有计算和计算平台标准化,才能让自动驾驶实现真正的量产。
此外,从电子电气架构看,从分布式架构向域架构、最终向中央计算架构发展是必然趋势。特斯拉目前在中央计算架构上发展较快,也证明了这一方式的可行性。
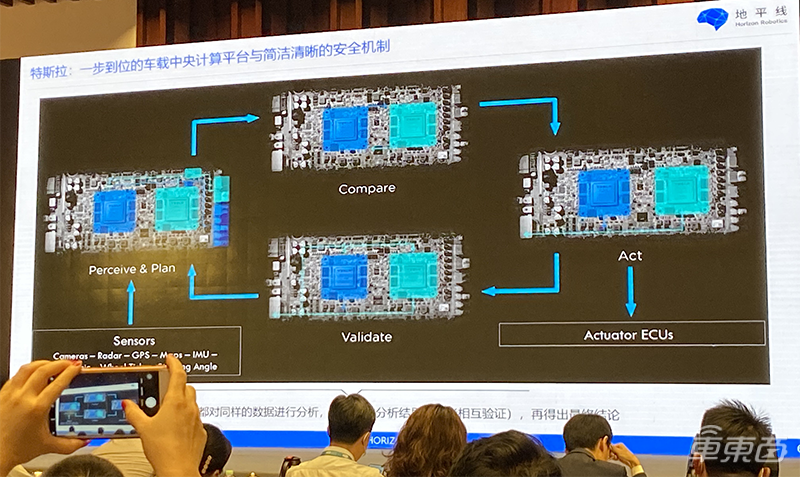
▲特斯拉采用一步到位的车载中央计算平台
从终局看,对于软件定义汽车来说,就是要软硬件解耦。包括计算平台在内的硬件,需要算力超配,但从时间看大概会在三年甚至更长时间才会更新一次。和硬件不同,上面的软件将实现全生命周期的高频次的更新,并由此给主机厂和相应产业链玩家带来新的盈利模式。
在AI计算部分,地平线预计将会在智能座舱和智能驾驶方面形成一个统一的计算平台,来完成AI计算本身对于智能座舱和自动驾驶的支持。
发展过程中,计算本身将面临一些挑战,原因即在于不同级别的自动驾驶针对算力的要求可能会是数量级的提升。
张玉峰表示,传统CPU的发展一直遵循摩尔定律,但现在摩尔定律已经无法支撑AI对于算力的要求。对此,地平线提出了针对AI芯片的“新”摩尔定律。“新”摩尔定律要求在满足高精度低延迟的条件下,更关注AI芯片真是性能的全面优化,单位成本下的峰值算力,编译器、架构和Runtime优化以及适应场景的算法优化及演进。

▲AI芯片的“新”摩尔定律
那么,涉及到汽车,车规级芯片的难度又在哪里?
在张玉峰看来,车规级芯片的难度包括产品开发周期长、难度大,从设计、验证到导入具体车型每个环节都需要较长的时间。在这一方面,2018年地平线的AI芯片已赋能美国自动驾驶车队,实现环视的视觉感知。2019年,地平线推出车规级AI芯片,到今年3月份这款芯片已经正式实现量产。
面向前视ADAS市场,地平线推出的基于征程二代芯片(Journey 2)的单目解决方案,可以在低于100毫秒的延迟下有效感知车辆、行人、车道线、交通标识、红绿灯等多种目标。据张玉峰介绍,目前该芯片已经与国内一个主机厂配合量产落地,另外年底前还将有一个车型推出。
Matrix自动驾驶计算平台可赋能无人出租车和无人物流场景。芯片本身的通用性让地平线可以以众包的方式完成基于视觉的高精地图的建图、定位、更新,此外也具备处理激光雷达点云数据的能力。
聚焦于车内,征程二代芯片可以同时接入针对驾驶员和针对乘客的两路摄像头。今年年初,地平线的多模交互方案是在长安UNI-T车型上完成了落地量产。
演讲最后,张玉峰还针对“主机厂如何抗衡特斯拉,赢得软件定义汽车时代的淘汰赛”这一问题给出了一个解决方案。在地平线看来,要做到这一点主机厂与有软件能力的芯片公司进行整体战略合作是必由之路。

▲宝马、戴姆勒分别与英特尔和英伟达展开了合作
二、滴滴:融合是实现和驱动汽车智能化的一个关键
本次主题峰会上,滴滴出行人工智能实验室智能控制首席科学家唐剑对滴滴在汽车智能化方面开展的工作做了分享。
首先,唐剑表示,在滴滴看来融合是实现和驱动汽车智能化的一个关键。把交通和出行做好,最重要的是实现人、车、路的深度融合,具体来讲即实现底层的智能交通基础设施、中间层的智能交通工具以及最上层的共享出行深度融合。
唐剑进而从视觉融合、端云融合、车路融合三个方面,概括了滴滴在实现人车路全方位和多层次融合上的一些积累与成果。
首先,视觉融合方面,滴滴计划到今年年底为100万辆滴滴网约车配备桔视车载设备。
桔视车载设备结合深度学习,特别是计算机视觉方面的算法,将可实现疲劳预警、分心检测、不良驾驶行为检测功能。
滴滴还联合合作伙伴拓展了驾驶员行为识别(DMS)的基础能力,打造出智能座舱系统,希望未来可以全面赋能乘用车以及商用车。唐剑表示,这款智能座舱系统除驾驶员行为识别(DMS)能力外,也支持人脸识别、手势识别、情绪识别等功能。
在ADAS领域,滴滴研发了后装ADAS系统。该系统支持前向碰撞预警(FCW)、车道偏离预警(LDW)、前向车距监测(FDM)、低速防碰撞预警(UFCW)和行人碰撞预警(PCW)等功能。目前部分功能已经在桔视车载设备上上线。
除此之外,滴滴还实现了驾驶员行为识别(DMS)和ADAS系统的联动,从而使实时、动态调整ADAS检测灵敏度以及DMS的预警频率成为可能。
端云融合方面,端指的是车端传感器采集的数据,云指的是滴滴完成派单和路径规划的出行平台。端云融合本质上是多元多维度数据的一种融合。
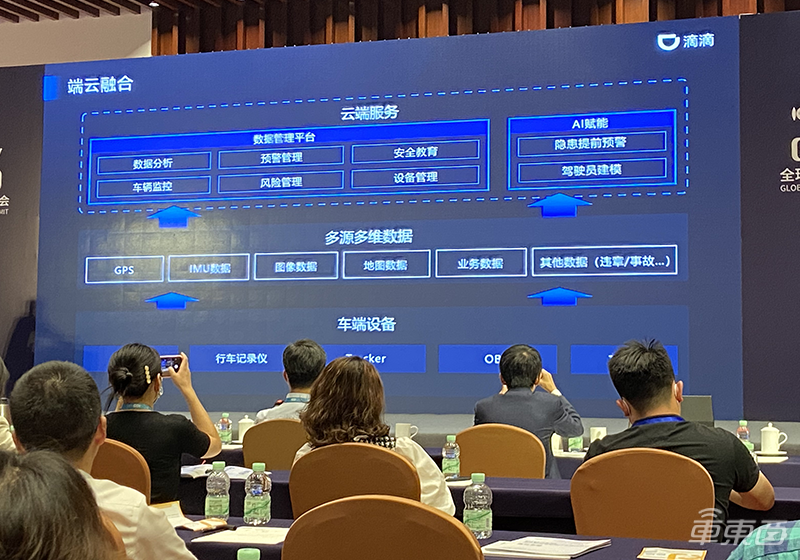
▲端云融合本质上是多元多维度数据的融合
唐剑表示,滴滴通过基于车端的多元的传感器采集到的数据,可构建数据处理的闭环。同时基于出行平台,可以对交通安全隐患进行分析,产生驾驶安全报告,评估基于历史的事故的数据,评估道路风险,从而全方位实现“行前预警,行中的识别和干预,以及行后的教育和治理”。
车路融合方面,一个典型案例就是车路协同系统。其中融合也包括了两个方面,其一是融合来自摄像头、毫米波雷达、激光雷达等不同传感器的感知数据,其二是路端数据和车端数据的融合。
三、华为:用平台化模式促进智能驾驶产业发展
华为智能汽车解决方案BU MDC营销总监汪意革,分享了华为对于如何推动智能驾驶产业发展这一问题的思考。
汪意革首先提到了智能手机,在他看来与智能手机一样,汽车也是由用户的需求所定义。智能化是一个趋势,汽车将成为人类社会新的智能移动终端。
华为把智能驾驶产业分成三大主要场景,分别是作业车、商用车和乘用车。
其中作业车的场景、道路、线路都相对简单,路况处于可控状态,车辆速度较低,车辆本身更多是作为一种生产工具。商用车的应用场景、道路、线路相对固定,路况也是处于可控状态,车辆同样属于生产工具。乘用车的情况则完全是另一种情况,行驶场景复杂、丰富,路况、速度可变性很高,而且对安全尤为重视,同时用户更加追求体验。
不同场景下产生的不同需求,使得智能驾驶产业面临多个维度的影响。进而,不同场景下的智能驾驶也将产生两种不同的发展路径。其中,商用车和作业车属于跨越式的发展场景,乘用车将会是渐进式的发展路径。

▲影响智能驾驶产业的七维函数
在华为看来,当前,汽车工业仍然是一个规模工业,规模化量产是汽车工业发展的一个前提条件,其中平台化是汽车产业的传统优良基因之一。
对于智能驾驶来说,当前L1-L2的主流架构ADAS向上演进已遇到“瓶颈”,无法平滑演进。未来的计算架构将走向集中式。通过集中式计算架构可以实现功能的持续优化和叠加,通过OTA升级的方式给用户带来更多体验。
同时,根据汽车工业的发展规律,越是复杂的系统就越是需要平台化。平台化一是可以达到摊薄成本的目的,二是可以生产出质量与可靠性均达到一致性的平台化产品。
基于上述考量,华为认为在计算平台上也应当沿用汽车产业“平台化”这一优良基因。汪意革在演讲中表示,对于产业和产业链玩家而言,平台化也可以带来好处。
对于主机厂来说,平台化一方面可以带给主机厂更多灵活选择与更大的创新空间。另一方面,主机厂具备决策规划控制能力,才能在未来的软件定义汽车的个性化体验中获得胜利。平台化可以在一定程度将主机厂从“感知”任务中解放出来,将更多精力投入到积累规控能力方面。
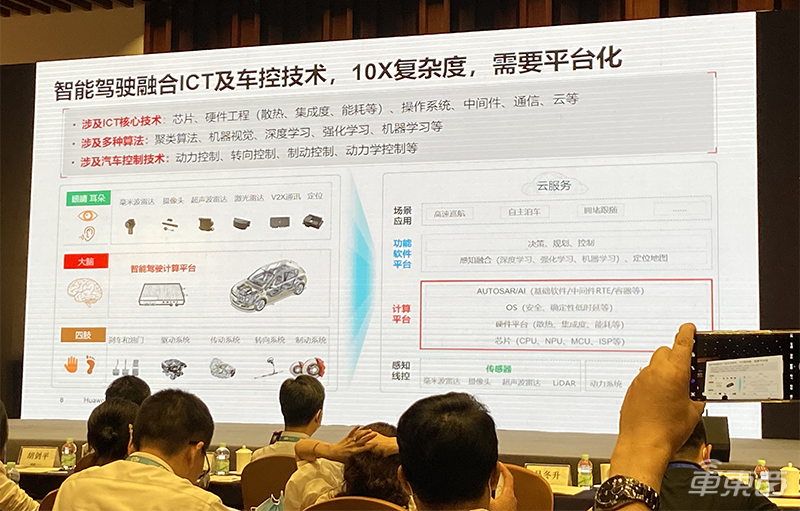
▲智能驾驶发展需借用平台化思维
站在智能驾驶的角度,还可以借鉴汽车工业专业化分工的模式去推进智能驾驶发展。
随着未来业界精细化分工的实现,将会出现一批聚焦做好各种算法的专业公司。同时标准化实现后,环境感知算法也将吸引多媒体公司实验室以及决策规划实验室参与,从而使相关产业生态进一步扩大。
整体来看,平台只有开放才会具有生命力,平台化加上开放性构成未来智能驾驶产业走向量产这一终极目标的关键。

▲平台化+开放性是智能驾驶产业走向量产的关键
就华为而言,华为聚焦于智能驾驶计算平台,目标是通过与上下游的执行器、传感器和应用算法合作伙伴合作,共同打造面向不同应用场景的、个性化的智能驾驶应用;与此同时,也通过产业链的精细化分工,让主机厂拥有一定的技术可控性,在决策规控方面积累起更多竞争能力。
演讲最后,汪意革还透露了一个重要消息——华为将在9月份北京车展期间发布MBC全新一代产品。
四、小马智行:无人化、规模化决定了自动驾驶的门槛
智能和电动汽车将会成为汽车未来的一种形态,已经成为一种行业共识。那么回到初衷,小马智行又想要追求什么样的汽车智能呢?
对此,小马智行(广州)总经理莫璐怡表示,从自动驾驶系统赋能汽车智能的角度看,自动驾驶系统其实赋予了汽车眼睛、手脚以及大脑的功能。
硬件层面,传感器是汽车的眼睛。手脚是说要求自动驾驶系统有能力精确地控制车辆的油门、刹车及转向,要做到这一点除掌握核心的线控技术外,也需要了解如何调整优化整个控制的算法。大脑指的是强大的计算单元或者计算平台。
软件层面,眼睛更多指代感知模块,手脚更多指代决策规划模块。就大脑而言,莫璐怡表示小马智行从成立至今就开始一直使用的一套全自研的自动驾驶底层架构和操作平台PonyBrain就是其中之一。
换句话说,在小马智行看来,只有把所有的软硬件系统统一得去看待,全局优化,才能实现更加强大的自动驾驶系统。
有了自动驾驶系统,汽车有了实现智能化的基础。下一步,自动驾驶系统还需要不断“学习和自我成长”,那么系统如何做到这一点?
莫璐怡在给出解决答案前,先抛出了一个观点,即自动驾驶是一个基于实践和大数据的创新性问题。这里的实践就是指真实的道路测试。
莫璐怡分享了一个关于雨天和水花处理的故事,用以说明为什么实践和大数据对于自动驾驶来说是重要的。
据介绍,2017年底小马智行正式落户广州前,其整个自动驾驶系统对雨天和水花处理能力是比较一般的,原因在于加州常年阳光明媚,没有太多雨天和水花的情景积累。
来到广州之后,前500天的运营时间里小马智行就经历了209个雨天,并且常常是大雨或者雷暴雨,这让小马智行的自动驾驶系统处理雨天情景的能力得到了提升。
一个视频片段显示,经过数据积累和训练后的自动驾驶汽车甚至可以超越一旁由人类驾驶的车辆,获得一个比人类更清晰的对世界的认知。

▲雨天场景下的系统处理视图
那么回到最初的问题,小马智行到底追求怎样的汽车智能?对此莫璐怡表示,小马智行自己的希望是将自动驾驶系统打造成一个虚拟司机(virtual driver)。这个虚拟司机可以像人类司机一样,hold不同车型(在不同的车辆平台上部署)和不同的道路。
最后,谈及整个产业的发展,莫璐怡强调汽车智能化的发展一定不是单打独斗的事情,未来必然会是一个开放的合作的生态。
“我们不停的在推进跟国内外顶级车厂深度的合作,我们相信我们的自动驾驶系统就像一个汽车的大脑一样,而我们需要一个强壮的身体,有百年沉淀的汽车行业正是一个强壮身体最好的基础。同时我们相信,自动驾驶是一个以技术主导的硬科技,无人化和规模化决定了自动驾驶的高门槛,而安全则是自动驾驶抱有的底线。”莫璐怡在演讲中说道。



-

凤凰网汽车公众号
搜索:autoifeng

-

官方微博
@ 凤凰网汽车

-

报价小程序
搜索:风车价


.png)
大家都在看







趣图推荐
.png)