顾维灏用“DARPA九问”回答毫末城市NOH实践经验
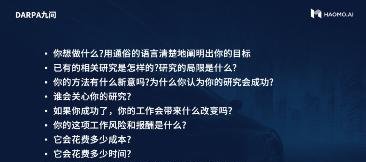
1975年,时任DARPA(美国国防部高级研究计划局)局长的乔治·海尔迈耶提出了著名的“海尔迈耶问答法”,这一思考方法由九个基础问题组成,此后帮助DARPA成功在隐形飞机、太空激光、太空红外技术和人工智能(AI)等项目上取得重要成就。
这一方法被称为“DARPA九问”,DARPA的项目都是围绕这一方法来评估和管控技术风险。
DARPA九问,代表了DARPA那些“雄心勃勃”提案的标准,既要有足够的创新性,有改变世界的目标,又要切合实际,有真正实现的可能。
在4月上海车展期间的闭门活动中,毫末智行CEO顾维灏采用“DARPA九问”的方法,系统地阐述了毫末所走的自动驾驶AI之路。
顾维灏在演讲中强调,毫末很早就确定数据驱动的路径,也是国内最早引入 Transformer 大模型、最早确立重感知路线的自动驾驶公司,同时毫末还发布了 DriveGPT 自动驾驶生成式大模型。

数据驱动
在演讲中,顾维灏首先提出了第一个问题,毫末想做什么产品?产品目标是什么?

顾维灏的回答是,毫末真正要做的是完全无人的自动驾驶,但是判断这件事情短期内实现不了。毫末选择的路线就是,先潜心研究L2+的辅助驾驶。
随着用户的大规模使用和技术的迭代研发,依靠数据驱动的方式实现自动驾驶能力的快速上升。毫末的高速NOH和城市NOH都是达到L4自动驾驶目标的过程。这个过程会非常有意义。
顾维灏提到现在正在发生的一些现象:“现在等红绿灯的时候路上按喇叭的越来越多,因为很多人都会看手机,看短视频。过去是开车时不能看手机,逐渐变成开车时偶尔可以看手机,最后变为看手机时偶尔开车。这是一个逐渐放权的过程,也是一个技术逐渐进步的过程”。
顾维灏强调:“安全是所有自动驾驶和辅助驾驶最主要的目标,我们要帮助用户,比如说在车里开视频会议无法立马结束,在这个间隙如何能够保障车辆的安全行驶”。
对于城市NOH产品,为了能够在复杂的城市道路场景当中保证安全底线,毫末在红绿灯控车、路口通行以及移动行驶这三个很重要的场景来设置产品目标。
首先,在红绿灯识别控车方面,毫末识别准确率必须要达到99.99%以上。这并不是一项简单的任务,因为在我国不同城市的红绿灯都有各自的形状和特点,有三排灯,有五排灯,有横着的,有竖着的,还有创新的,而且黑天和白天的红绿灯识别难度也不相同。
其次,在路口通行方面也非常具有挑战,路口场景有直行,有左转、右转,还有Y字形、三岔口、六岔口等。毫末直行通过率要做到99%,复杂路口也要达70-80%,在产品设计的时候就按此来定义目标。
第三,是移动行驶。毫末的城市NOH要解决在什么样的车流状况下运行最好,这里就涉及产品定义,包括使用的通过率是多少,以及如何保障用户的安全。
Transformer+重感知路线+Drive GPT
这里就要回答第二个问题:已有的相关产品是什么?产品局限是什么?
毫末的回答是采用重感知技术来做城市NOH,要解决基于高精地图路线的区域限制和成本限制的问题。
顾维灏对于毫末在自动驾驶AI上的创新研究,进行了一番回顾。
毫末早在三年前,也就是在2020年下半年开始启动NOH项目,启动之前“蔚小理”都已经开始研发,当时行业基本都采用英伟达Orin芯片+高精地图技术路线。但高精地图由于成本因素、政策限制、鲜度保持等方面存在诸多难点和问题。
在这种情况下,毫末要么选择追随行业模式,要么另辟蹊径寻求新路径,毫末给出的答案是:锚定重感知技术路线。技术产品研发与市场落地应用有着一定的时间差,事实证明这一技术路线目前已成为行业共识。
顾维灏解释“中国高速公路一共有30万公里,城市道路1000万公里,市面上最牛的地图公司采集车也不过才200台,1000万公里用200台采集车采集,而且要采集很多要素,在中国的基建条件下可行性不高,依赖高精地图方案的话会在城市行驶边境拓展、地图的一致性、驾驶的安全和稳定性上都会产生影响和问题”。
对于第三个问题:毫末采用的方法有哪些创新之处?顾维灏做了如下回答:毫末进行了三场技术创新的攻坚战。
第一个创新是,毫末将感知方法从CNN模型转型到Transformer大模型。
随着自动驾驶感知能力的不断提升,摄像头的数量在不断增加,传统的卷积神经网络CNN模型在处理大规模图片信息的时候会遇到效率低下的弊端。
在2020年底的时候Transformer大模型已经在自然语言处理上开始应用了,毫末在2021年初就把Transformer识别图像的方法开始跟行业讲述了,现如今许多企业也开始使用Transformer技术。
第二个创新就是,毫末不再用高精地图。
在2021年的时候,毫末开始研究不使用高精地图的辅助驾驶方案,在最早期高精地图是有用的,十几年前摄像头像素只有一百万,计算力只有2.5T,但现在算力都300多T,外界环境发生了变化,就会促进技术方案随之变化。
基于更多的前视、后视的测试方法、Transformer大模型以及BEV感知模式,这些技术的加持可以让毫末NOH看得更远、看得更广,无论是左转、右转都可以精准识别。
第三点创新就是,毫末在最近一次AI DAY上发布的首个自动驾驶生成式大模型DriveGPT。

顾维灏提到:“得益于去年毫末就与火山引擎合作搞了一个自动驾驶智算中心,规模可以说是自动驾驶领域的第一。
毫末很早就意识到云端计算大模型一定是发展趋势,云端计算如果用公有云就太贵了,如果建立私有云操作中心一定会更划算。
有了自己的智算中心加持,DriveGPT以大数据为基础,加上GPT这种新技术范式,再加上使用过程中有了用户的反馈和对能力的判定,加起来使得自动驾驶能够可行。”
另外,顾维灏还提到,毫末有自己的算力、模型和大规模量产应用场景,就像OpenAI可以基于微软提供的算力、数据和应用环境一样同时具备这三要素。
但是中国同时拥有这三个要素,并想做这件事情的公司少之又少,所以毫末才可能把做的所有方法都发布出来。
毫末的成功会带来哪些改变?
当GPT出现之前,会分很多子研究方向和子研究任务,比如说机器翻译就是非常封闭的方向,像文章摘要、文章的理解或者分词等,每一项自然语言都是一个一个独立的小任务,直到ChatGPT出现,这些小任务都不存在了,只用一种方法就把自然语言所有问题都解决了,而且还可以不断推理,抽取常识,类比到自动驾驶也是一样。
顾维灏直言行业内已经搞了20年,基于规则也好,基于小模型也好,包括预测、规划、决策、控制,每一项都分成一个个小任务,20年也没搞成。
因此毫末将DriveGPT这样的方式引进来,先搞定认知的问题,把感知的四个大模型任务合为一个,那自动驾驶从此就两项任务,一个是感知任务,一个是认知任务。
因此DriveGPT或是说GPT这种新的科技范式会让自动驾驶产生质的变化并且和以往完全不同。
值得一提的是,毫末推出的自动标注,在行业上,给出正确的标注结果,一张图片需要5元;如果使用 DriveGPT雪湖·海若的场景识别服务,一张图片的价格将下降到0.5元。单帧图片整体标注成本仅相当于行业的1/10。
接下来,毫末会将图像帧及 4D Clips场景识别服务逐步向行业开放使用,这将大幅降低行业使用数据的成本,提高数据质量,从而加速自动驾驶技术的快速发展。
演讲最后,顾维灏也介绍了时间、成本以及如何验证成功等问题。
做自动驾驶周期一定是漫长的,面对终极目标——完全无人的自动驾驶Robotaxi,维灏也给出了他们的计划“当毫末城市NOH被数万个或者数十万个用户用起来的时候,并且平均MPI达到一定水平,我们就可以启动这个赛道产品了”。



-

凤凰网汽车公众号
搜索:autoifeng

-

官方微博
@ 凤凰网汽车

-

报价小程序
搜索:风车价


.png)
大家都在看







趣图推荐
.png)